Существует множество проектов и руководств, связанных с переделкой старых CD/DVD-плееров в плоттеры с ЧПУ на базе Arduino. Сегодня я хотел бы поделиться тем, как легко построить свой собственный недорогой мини-плоттер с ЧПУ на Arduino.
Приступим.
Данная статья является переводом, однако для удобства восприятия повествование будет идти от первого лица.


Основные компоненты:

Инструменты:
Программное обеспечение:
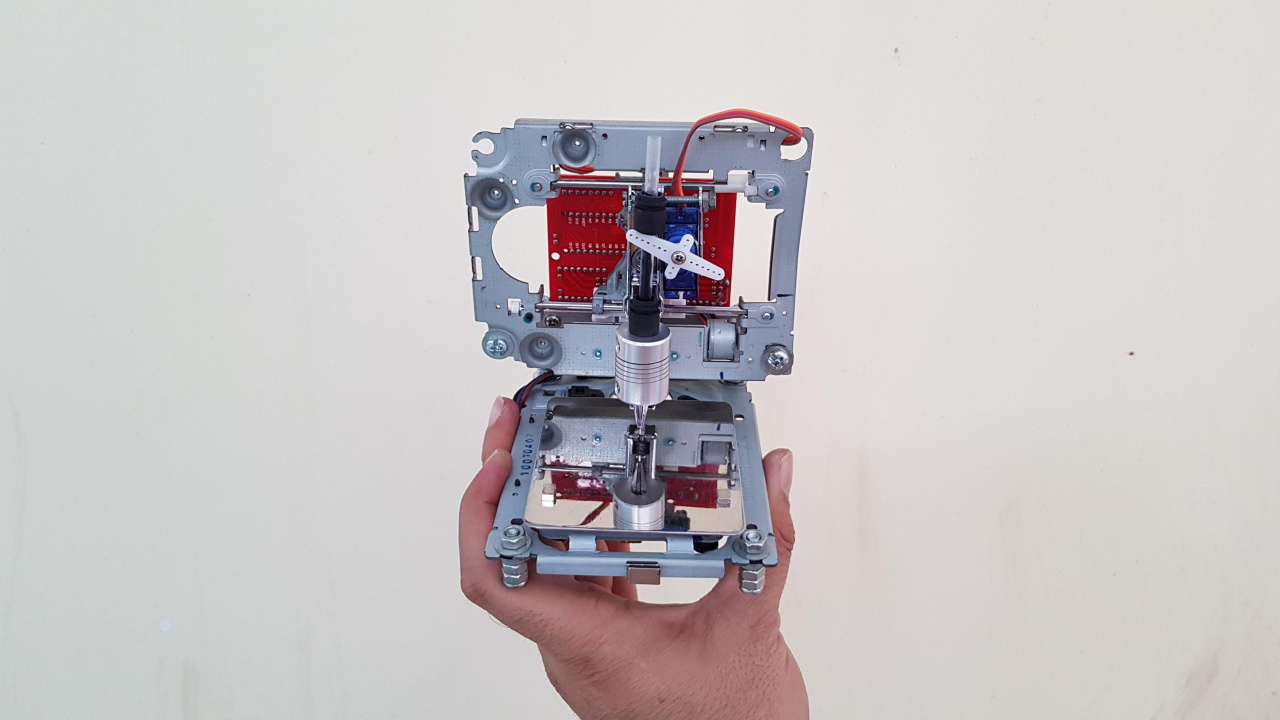
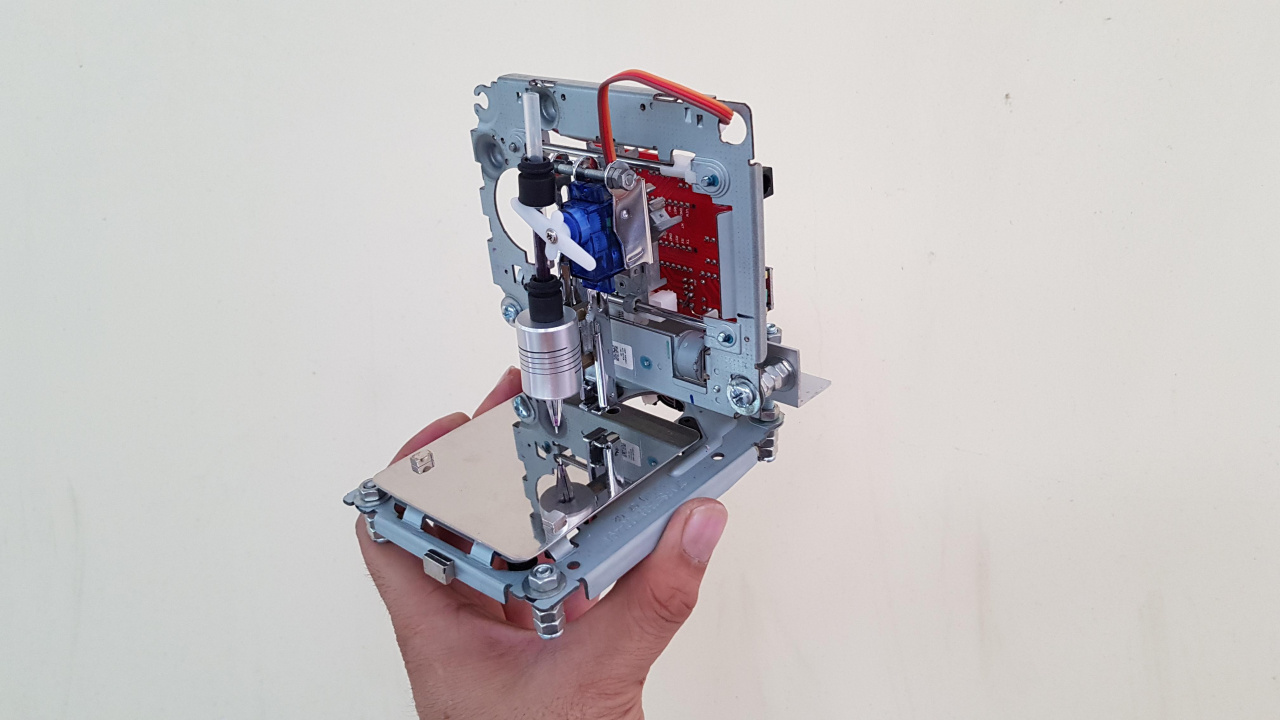
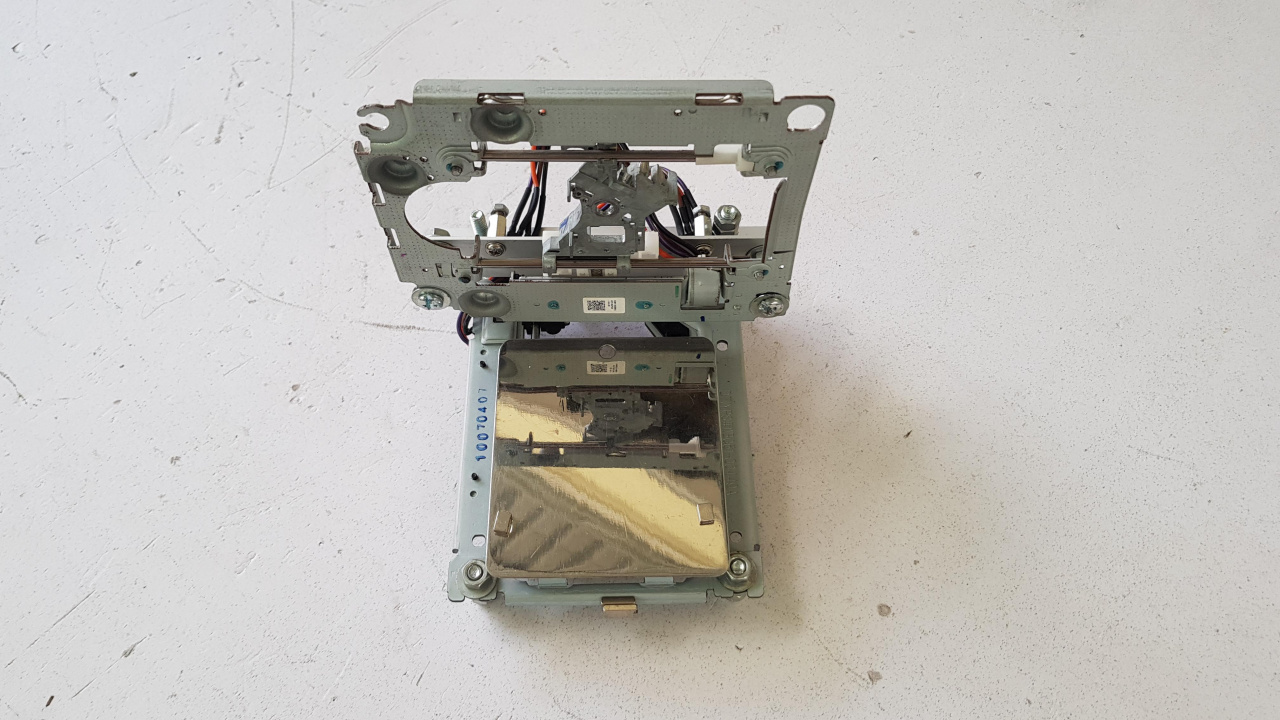
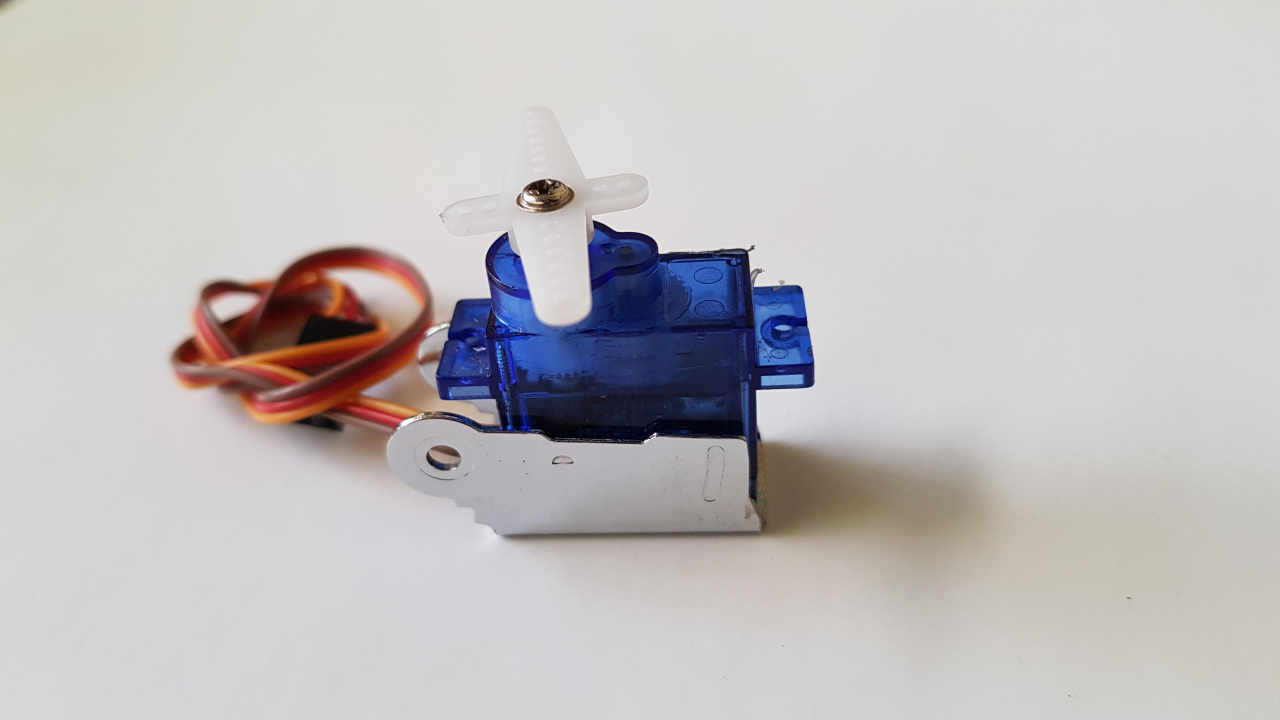
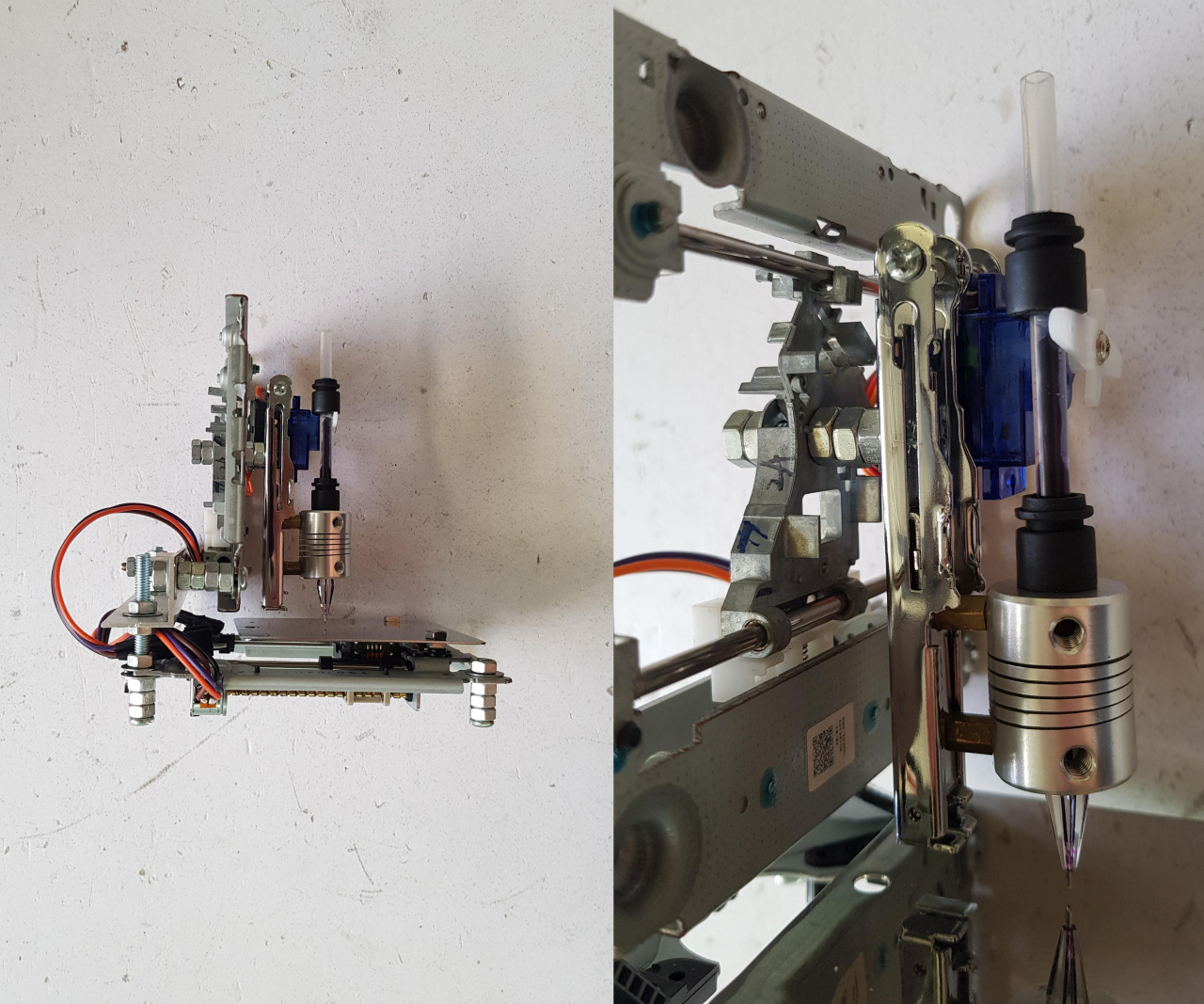
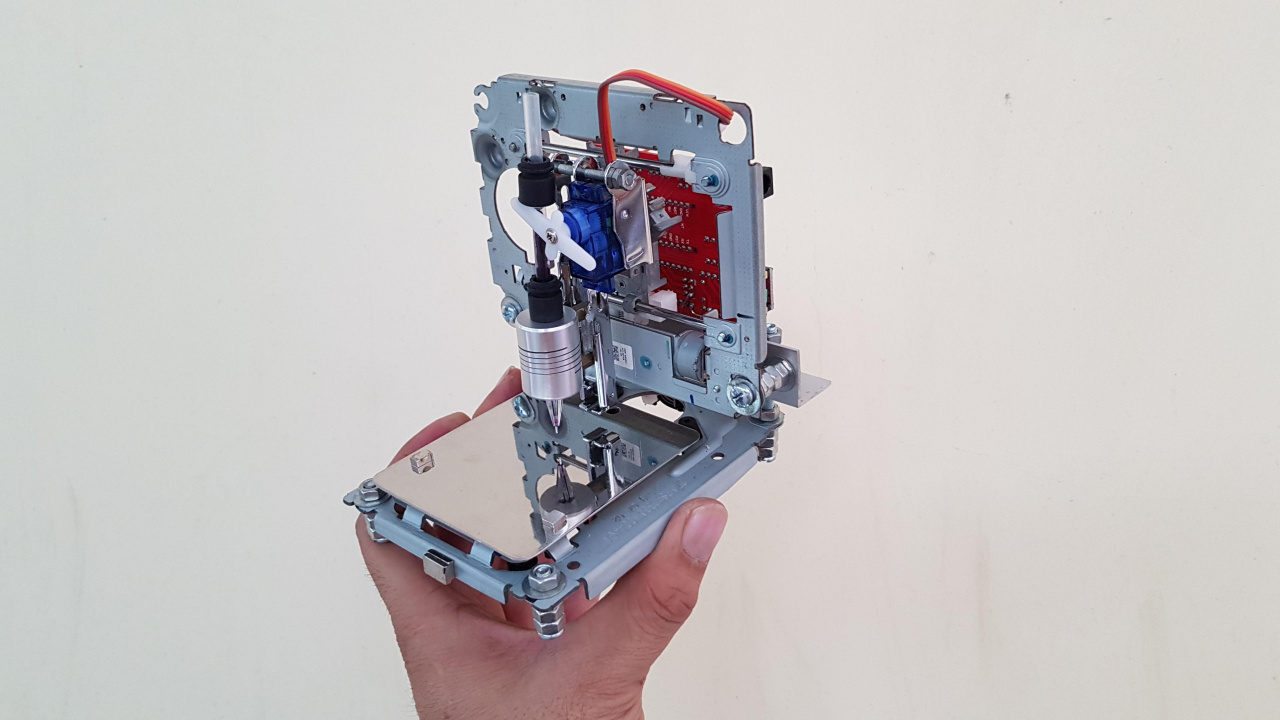
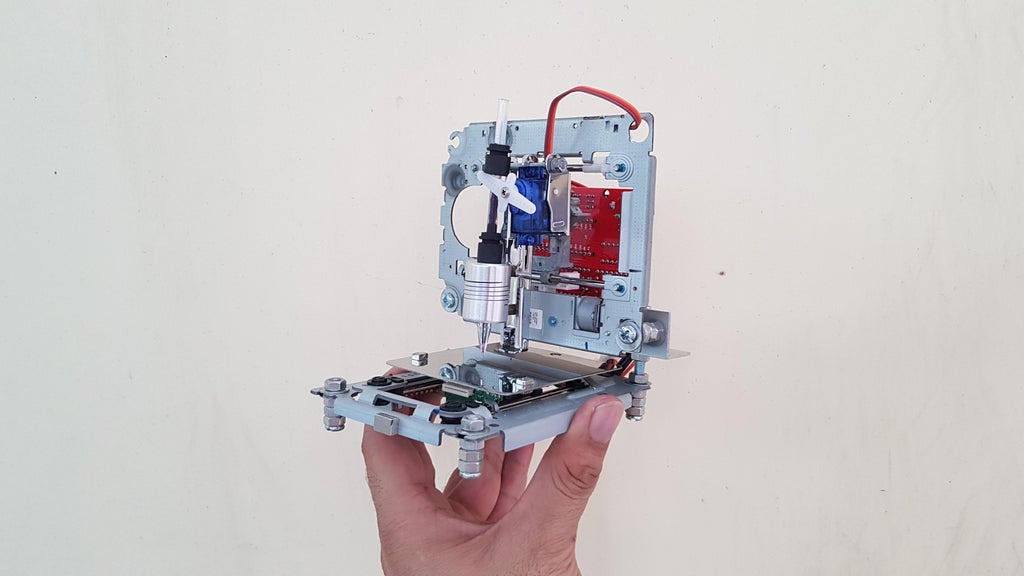
Идея создания мини-плоттера с ЧПУ проста: используйте два старых CD/DVD-плеера с шаговыми двигателями, один используется как поверхность для черчения, которая движется вперед и назад по оси Y, другой установите вертикально на нем, чтобы обеспечить движение влево и вправо по оси X. Затем мы устанавливаем сервопривод RC на оси X, чтобы поднимать и опускать перо во время построения осей Z.

В интернете трудно найти точные технические характеристики шаговых двигателей приводов DVD/CD. Я нашел в Интернете характеристики шагового двигателя DVD/CD, который похож на мой. Важные параметры выделены полужирным шрифтом.
| Тип двигателя: | 2-фазная 4-проводная система |
| Угол шага | 18 ° |
| Напряжение | 5В |
| Сопротивление | 14 Ом |
| Фаза | 2 - 2 |
| Режим привода | Биполярный |
Максимальная частота пуска |
900 пакетов в секунду |
| Максимальная скорость вращения | 1200 пакетов в секунду |
| Удерживающий момент | 40 |
| Наибольший диаметр ходового винта | Φ3 |
| Шаг ходового винта | 3 |
| Размер внешнего диаметра двигателя | 15 мм |
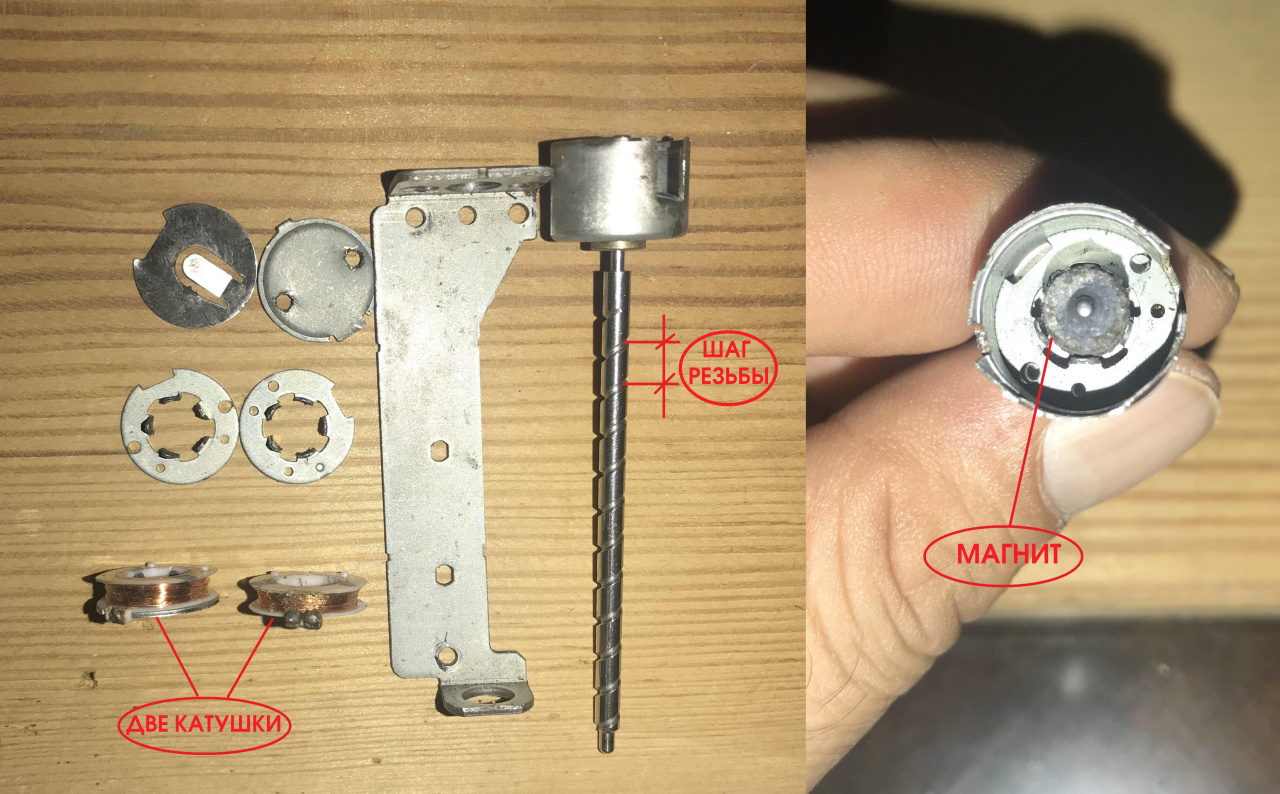
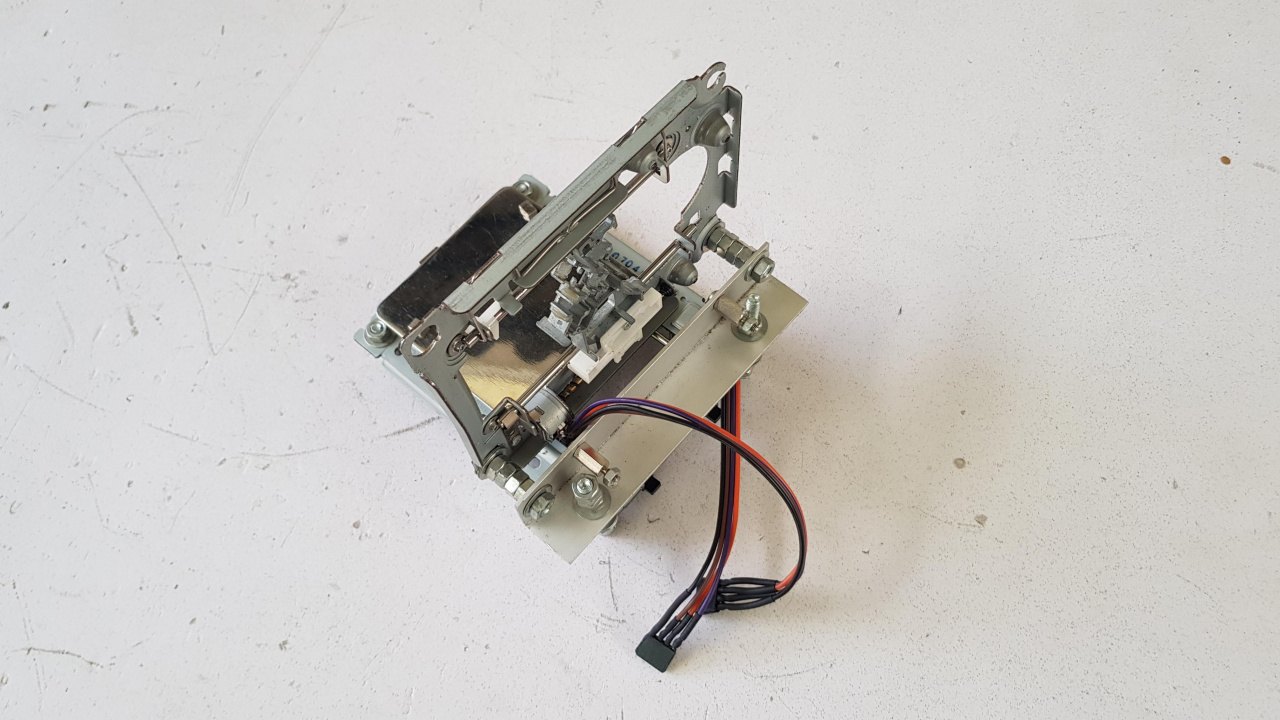
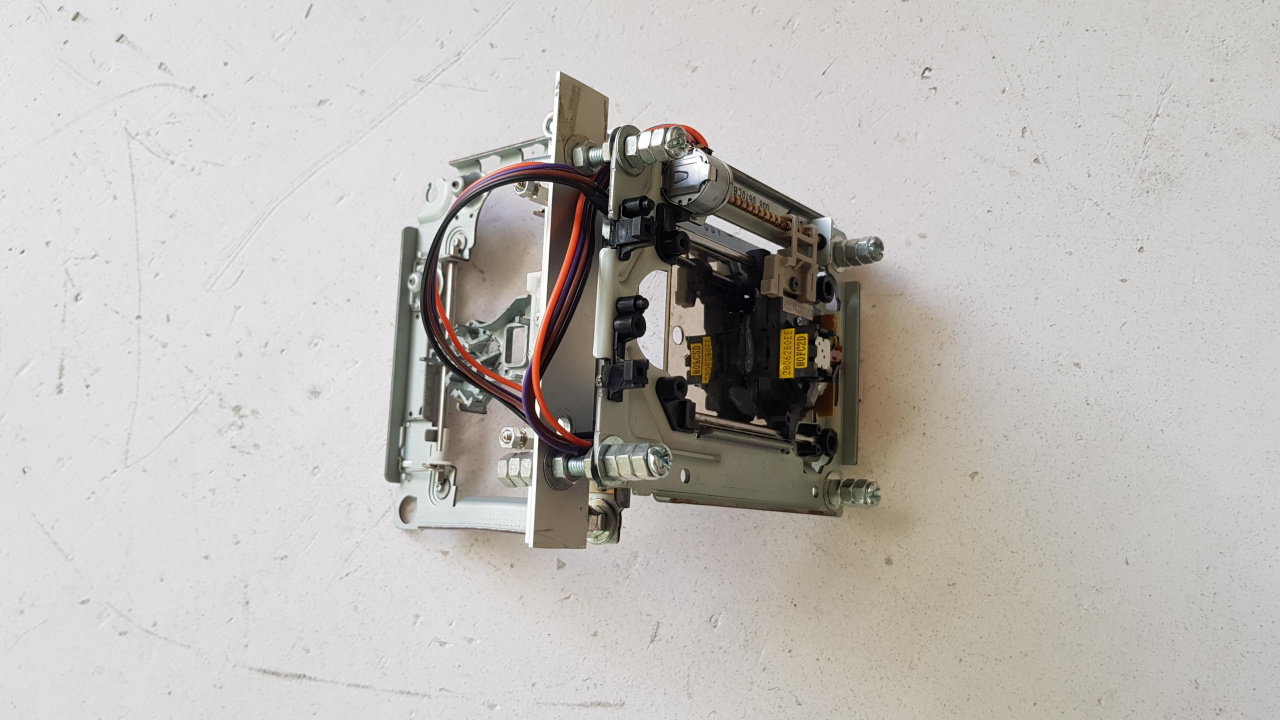
Разборка шагового двигателя DVD / CD привода
У меня было два разных типа DVD/CD-плееров, один использовался для оси X с сопротивлением катушки шагового двигателя 14 Ом, а другой - для оси Y с сопротивлением катушки 10 Ом.


Лазерно-гравировальный станок с ЧПУ WoodTec WL 9060 100W ECO
Лазерный станок WoodTec WL 9060 100W ECO предназначен для лазерной обработки различных материалов. Обработка материалов производится методом резки и гравировки по плоскости.

 79
79
Лазерно-гравировальная машина с ЧПУ LM 9060 PRO 100W
Рабочий стол – 900х600 мм; Мощность трубки – 100 Вт; Ресурс – 10 000 моточасов; Потребляемая мощность – 1,5 кВт: Вес – 340 кг.
523 844 ₽
 16
16
Лазерный станок для резки фанеры, пластика и других материалов LM 1616 PRO OPEN 180W
Размеры рабочего стола – 1600 х 1600 мм; Мощность трубки – 180 Вт; Ресурс – 10 000 моточасов; Потребляемая мощность – 4 кВт; Вес – 700 кг.
1 122 524 ₽
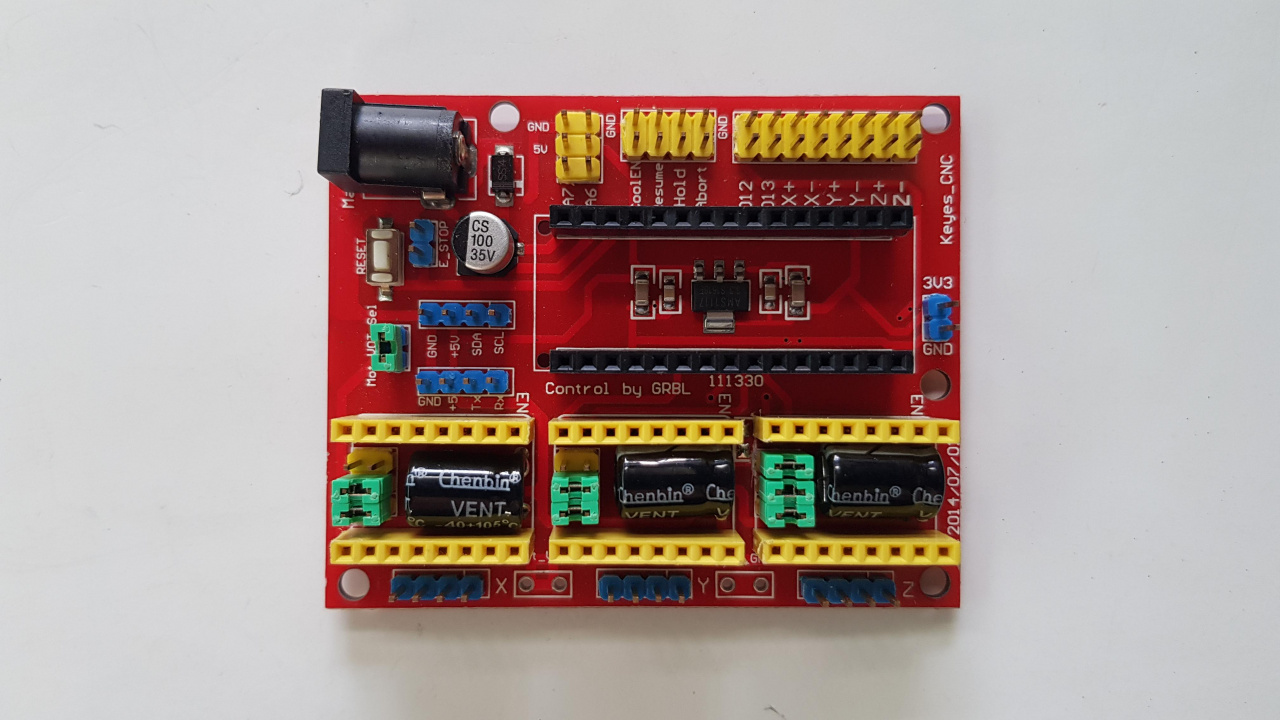
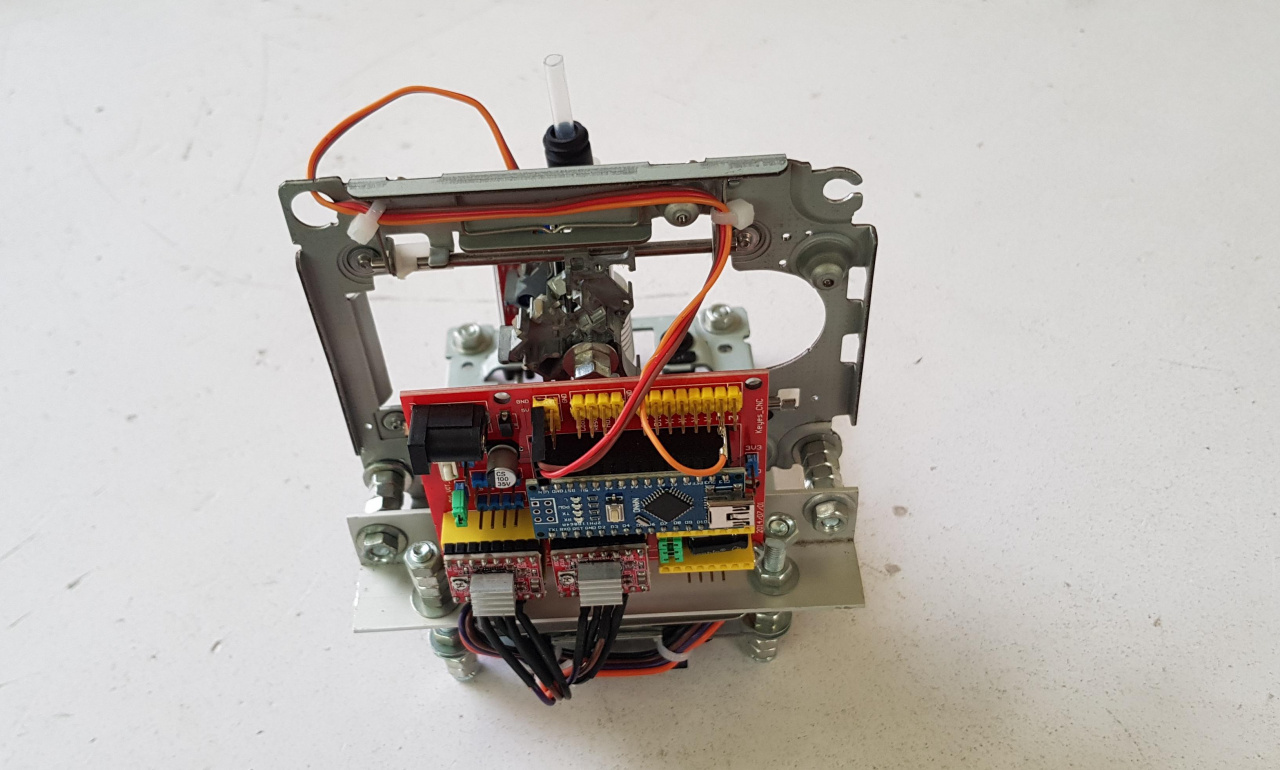
Вид сверху
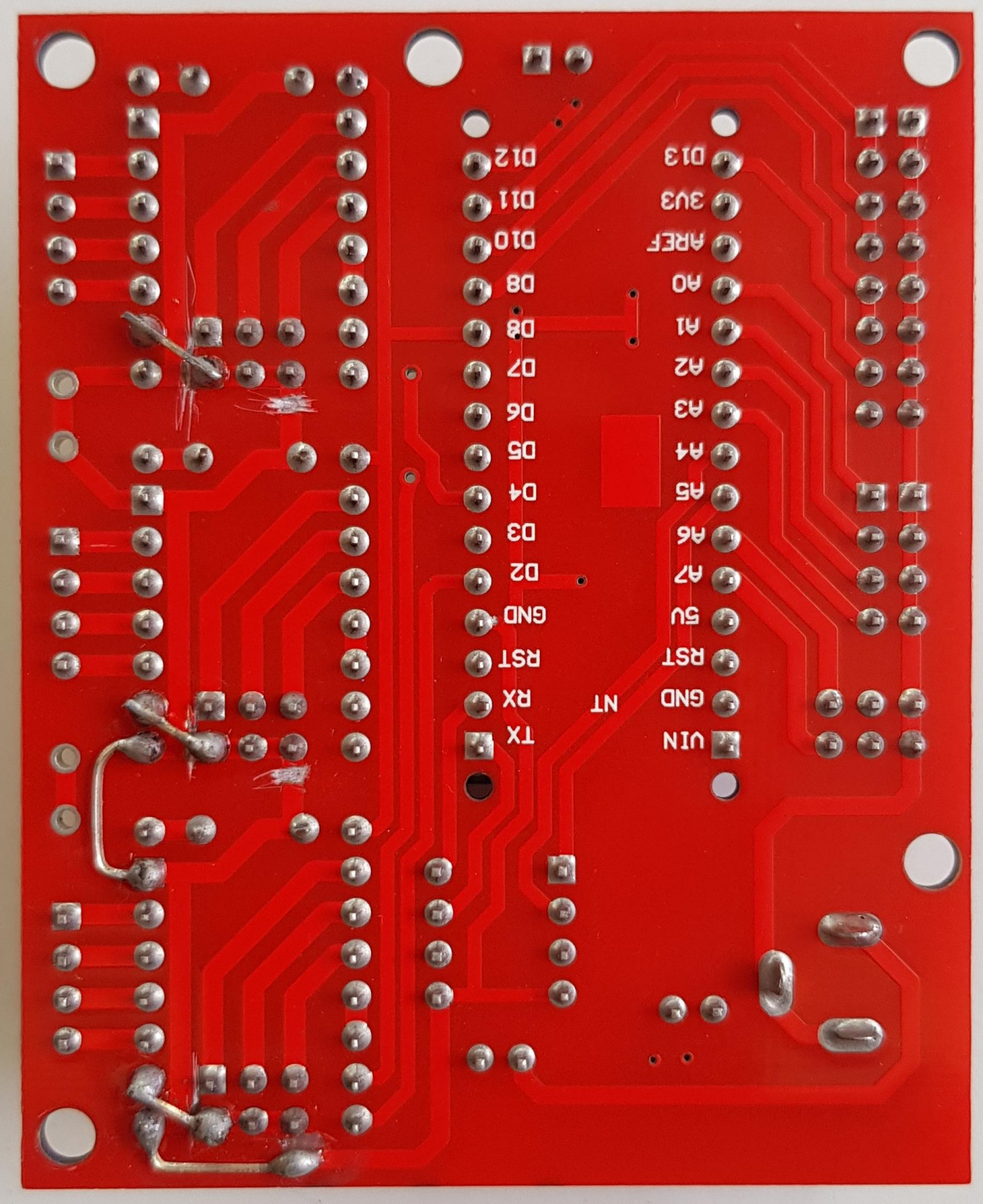
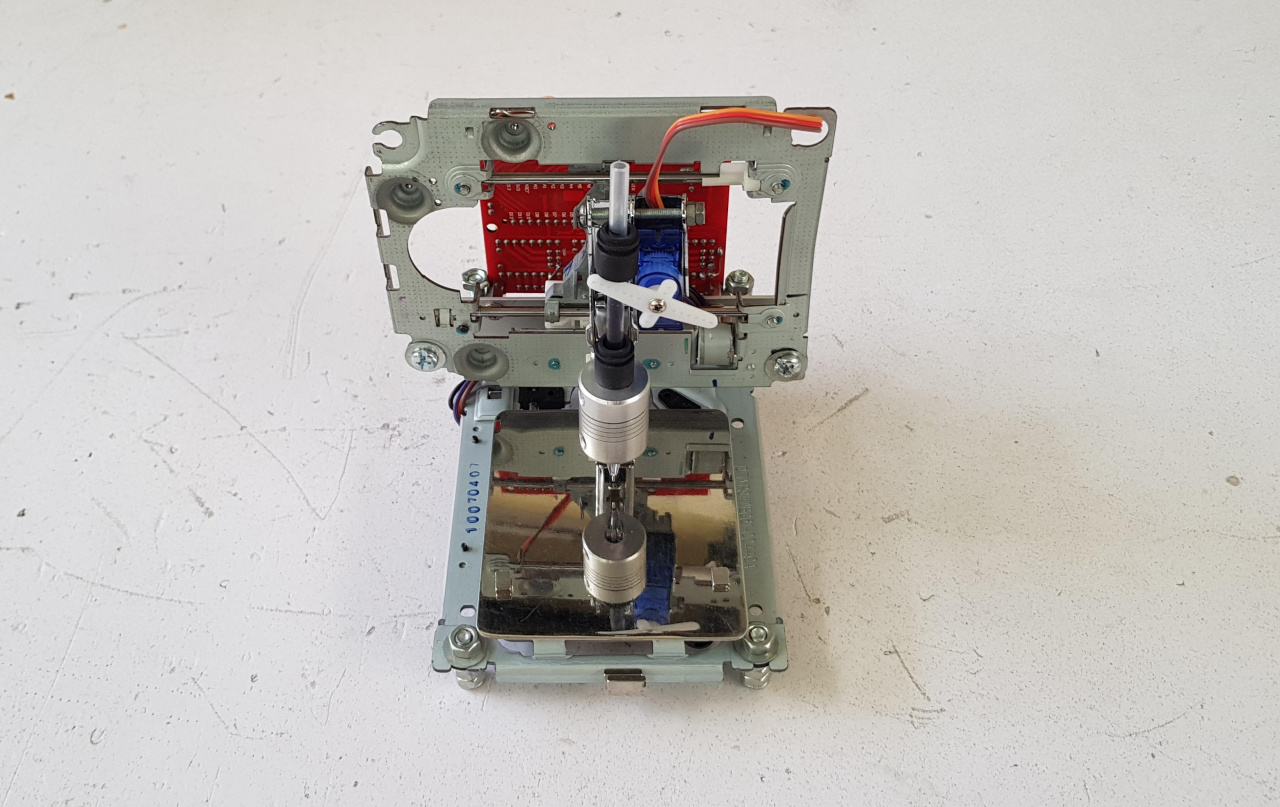
Вид снизу
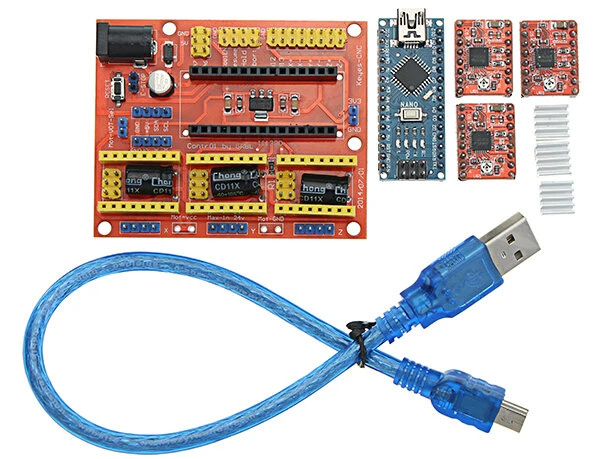
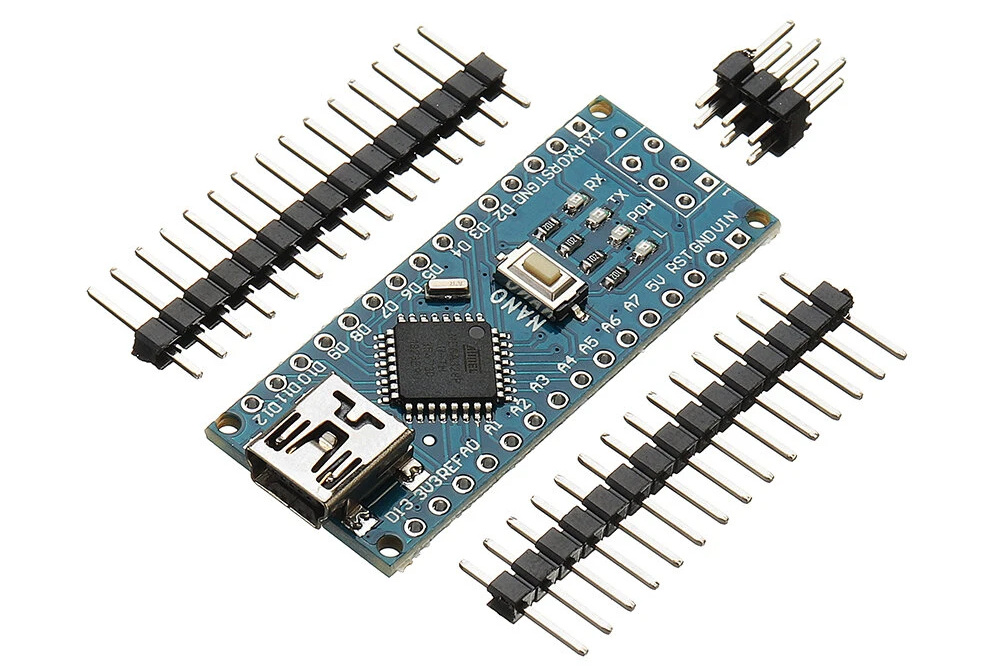
Плата расширения CNC v4 для Arduino Nano имеет 3 слота на печатной плате для модулей привода шаговых двигателей и один слот для Arduino Nano. Она может управлять 3 шаговыми двигателями от Arduino Nano. Плата расширения CNC V4.0 имеет несколько контактов GPIO, доступных для подключения к другим модулям, таким как концевой выключатель, а также к интерфейсу I2C или последовательной связи. Питание для 3 модулей привода шаговых двигателей и платы Nano подается через разъем внешнего питания (12 В постоянного тока).
Я купил плату расширения CNC для Arduino Nano v4 по низкой цене из Китая. По ссылкам я обнаружил, что мне нужно настроить как аппаратное, так и программное обеспечение, чтобы использовать прошивку GRBL и настроить режим микрошагов для A4988.
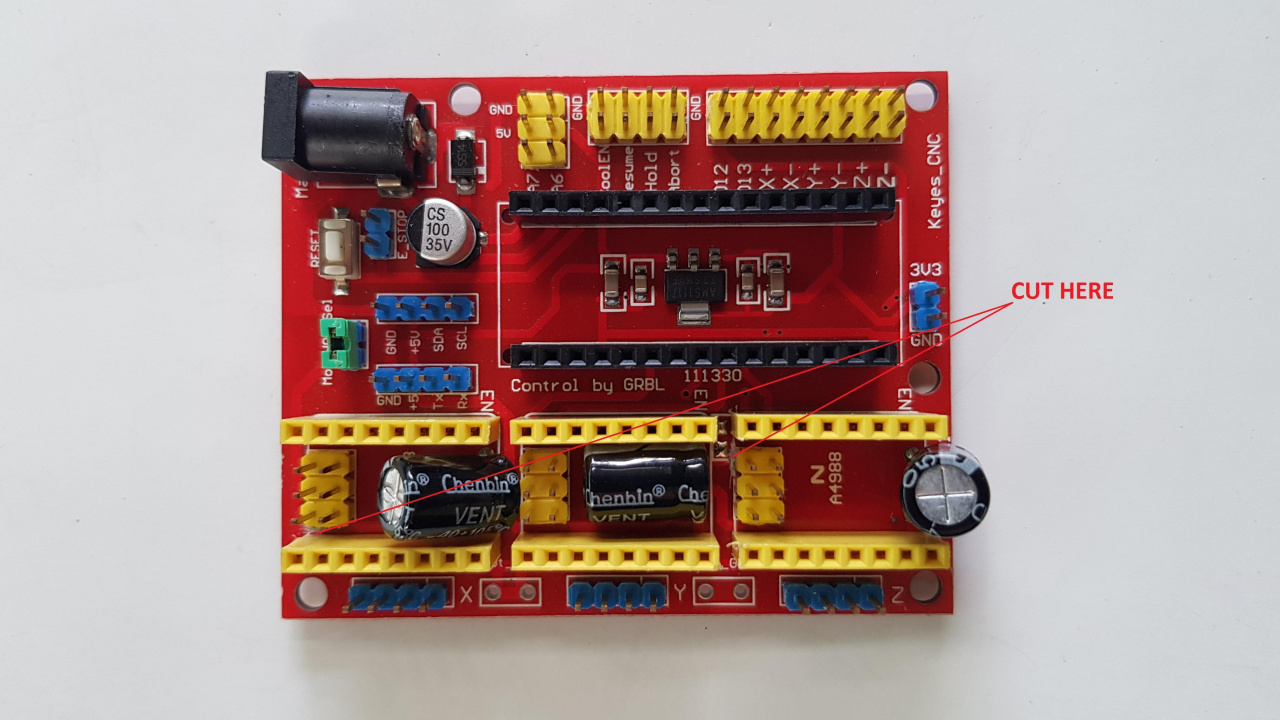
Все перемычки для настройки количества микрошагов подключены к GND, а их нужно подтянуть к VCC. Значение микрошага фиксировано на низком уровне и всегда переводит шаговый драйвер в полное разрешение шага.
Контакты, подключенные к входам «STEP» и «DIRECTION» драйверов шагового двигателя, неверны по сравнению с исходными определениями GRBL. Плата расширения CNC v4 использует Arduino Nano, поэтому мы можем исправить определения контактов «STEP» и «DIRECTION» в файле «cpu_map_atmega328p.h», расположенном в папке grbl, следующим образом:
#define X_STEP_BIT 5 // Uno Digital Pin 2
#define Y_STEP_BIT 6 // Uno Digital Pin 3
#define Z_STEP_BIT 7 // Uno Digital Pin 4
#define X_DIRECTION_BIT 2 // Uno Digital Pin 5
#define Y_DIRECTION_BIT 3 // Uno Digital Pin 6
#define Z_DIRECTION_BIT 4 // Uno Digital Pin 7
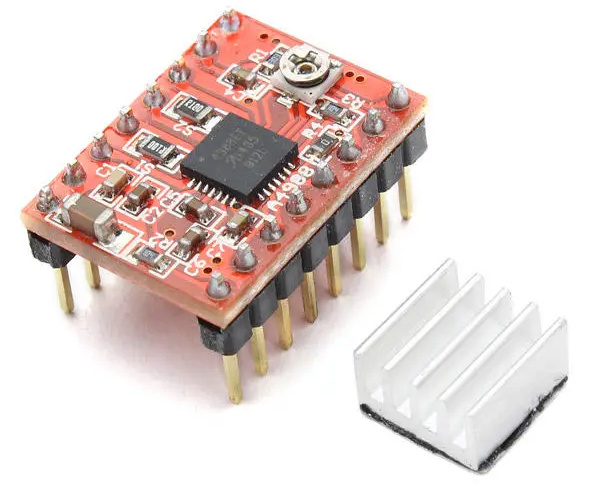
A4988 - это микрошаговый драйвер двигателя со встроенным переводчиком для упрощения работы. Он предназначен для работы биполярных шаговых двигателей в полушаговых, полушаговых, четвертьшаговых, восьмых и шестнадцатошаговых режимах с выходной мощностью до 35В и ± 2А.
Мы можем управлять шаговым двигателем с помощью всего двух контактов нашего контроллера: один для управления направлением вращения, а другой для управления шагами.
Во многих приложениях микрошаговый режим может повысить производительность системы, а также снизить сложность и стоимость системы по сравнению с полушаговыми и полушаговыми методами вождения. Микрошаговый режим можно использовать для решения всех проблем с резонансом, вибрацией и шумом в системе шагового двигателя, а также для повышения точности и разрешения шага.
По правилам, чем больше микрошагов, тем плавнее движения, но меньше крутящий момент, и наоборот. Я пробовал с 1/16 микрошагов, но в конце концов выбрал 1/8 микрошагов, что является хорошей комбинацией плавного движения и крутящего момента.
Каждый поворот шагового двигателя DVD/CD изначально разделен на 20 шагов с углом 18 °/ шаг (1 поворот = 360 градусов | 360/20 = 18 °). Когда мы применяем микрошаговый режим с разрешением 1/8 шага на A4988 для управления этим шаговым двигателем, каждое вращение шагового двигателя DVD/CD будет разделено на 160 шагов с углом 2,25°/ шаг, что сделает вращение шагового двигателя намного более плавным.
| MS1 | MS2 | MS3 | ШАГ РАЗРЕШЕНИЕ |
ШАГИ ДО РЕВОЛЮЦИИ |
| 0 | 0 | 0 | 1 | 20 |
| 1 | 0 | 0 | 1/2 | 40 |
| 0 | 1 | 0 | 1/4 | 80 |
| 1 | 1 | 0 | 1/8 | 160 |
| 1 | 1 | 1 | 1/16 | 320 |
Моя настройка микрошагов - разрешение 1/8 шага для шаговых двигателей оси X и Y.
Подстроечный потенциометр на плате A4988 может использоваться для установки ограничения тока шагового двигателя. Следует обратить внимание на следующее:
| Ось плоттера | р | V | Imax | RCS | VREF |
| Шаг по оси X | 14.00 Ом | 5,00 В | 0,36 А | 0,10 Ом | 286 мВ |
| Шаг по оси Y | 10,00 Ом | 5,00 В | 0,50 А | 0,10 Ом | 400 мВ |
Следуя приведенному выше расчетному листу, мои окончательные настройки ограничения тока для 2-х шаговых двигателей следующие:
Чтобы рассчитать VREF, необходимый для целевого тока A, мы можем применить следующие простые формулы:
Установка оси X и Y:
Существует много инструкций по изготовлению осей X и Y для мини плоттеров с ЧПУ.В этом проекте я в основном использовал болты для соединения компонентов.
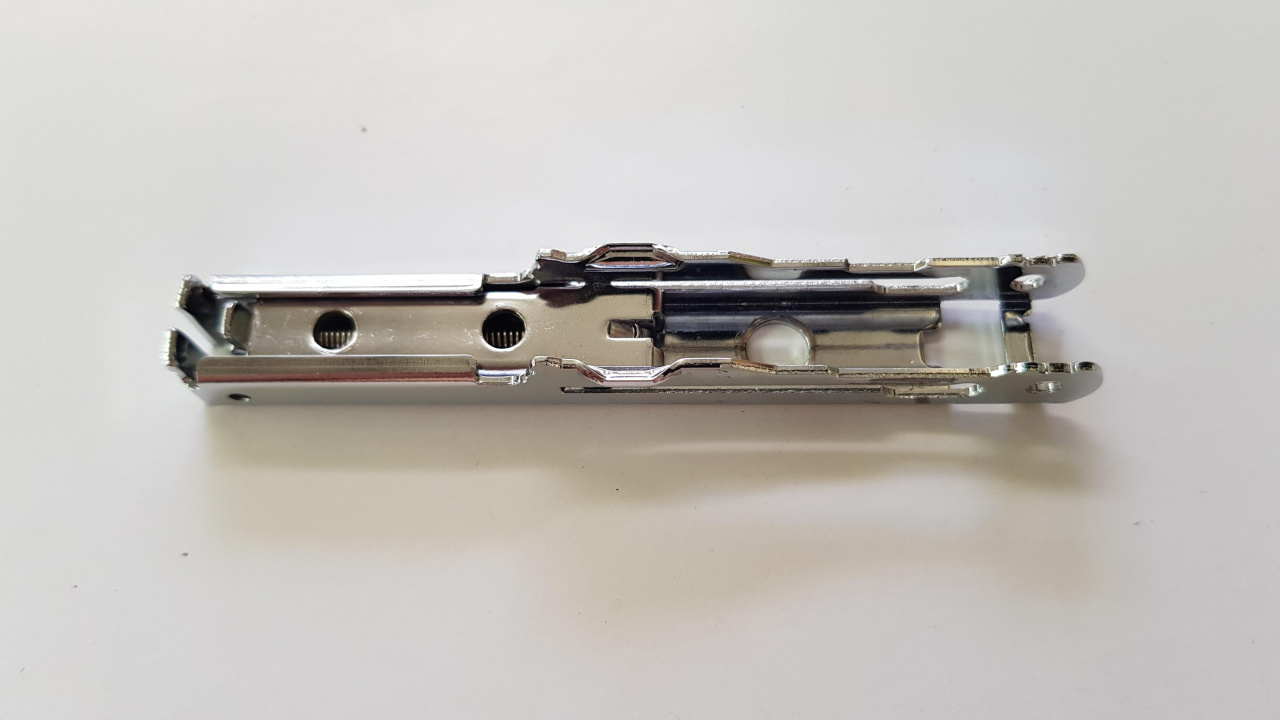
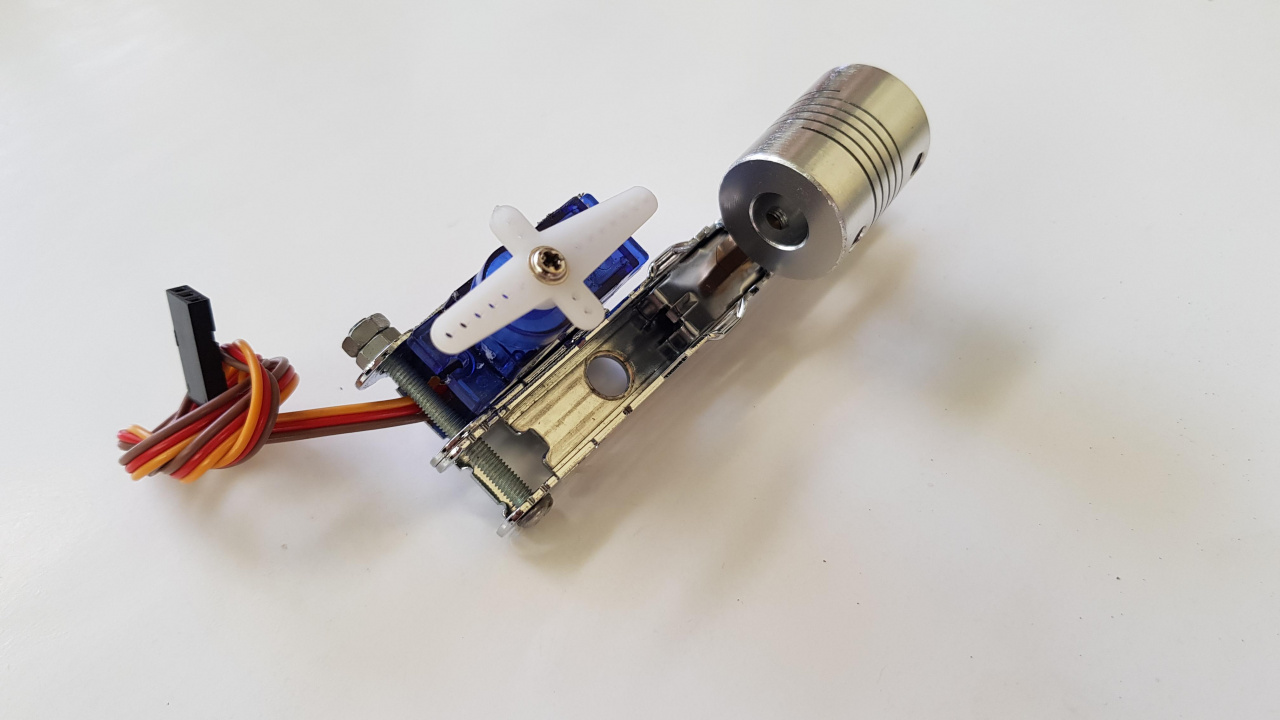
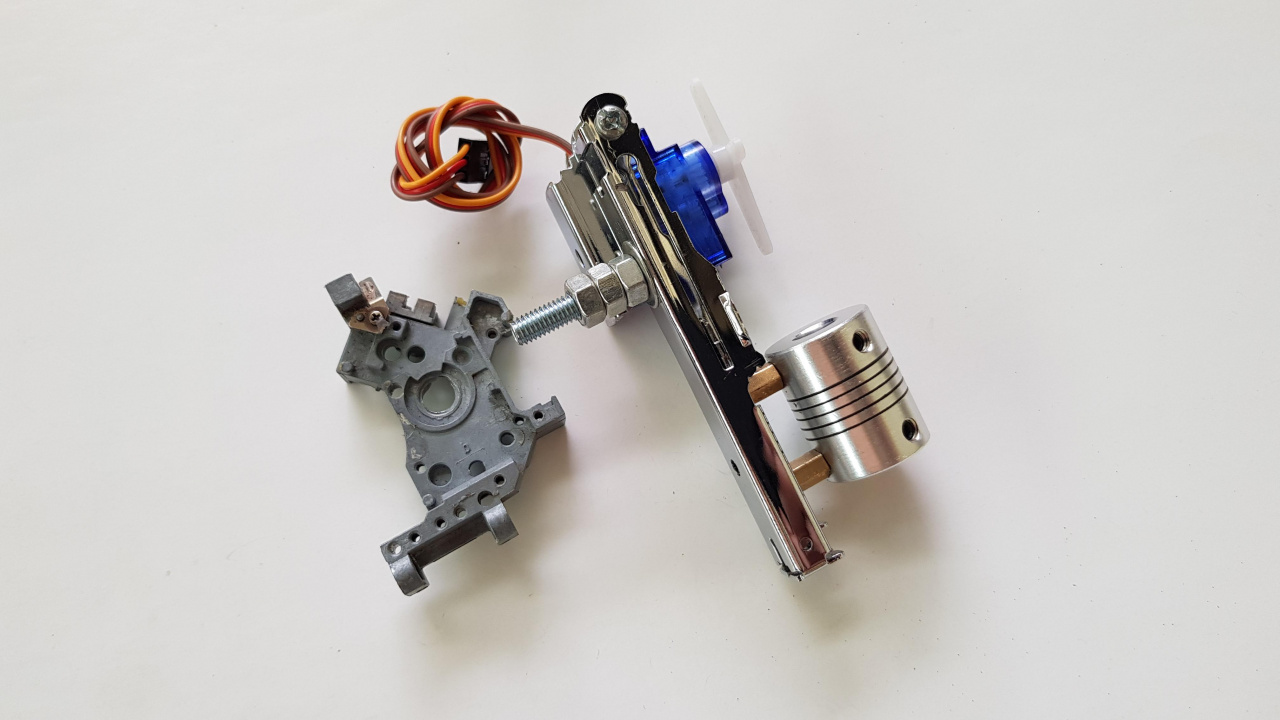
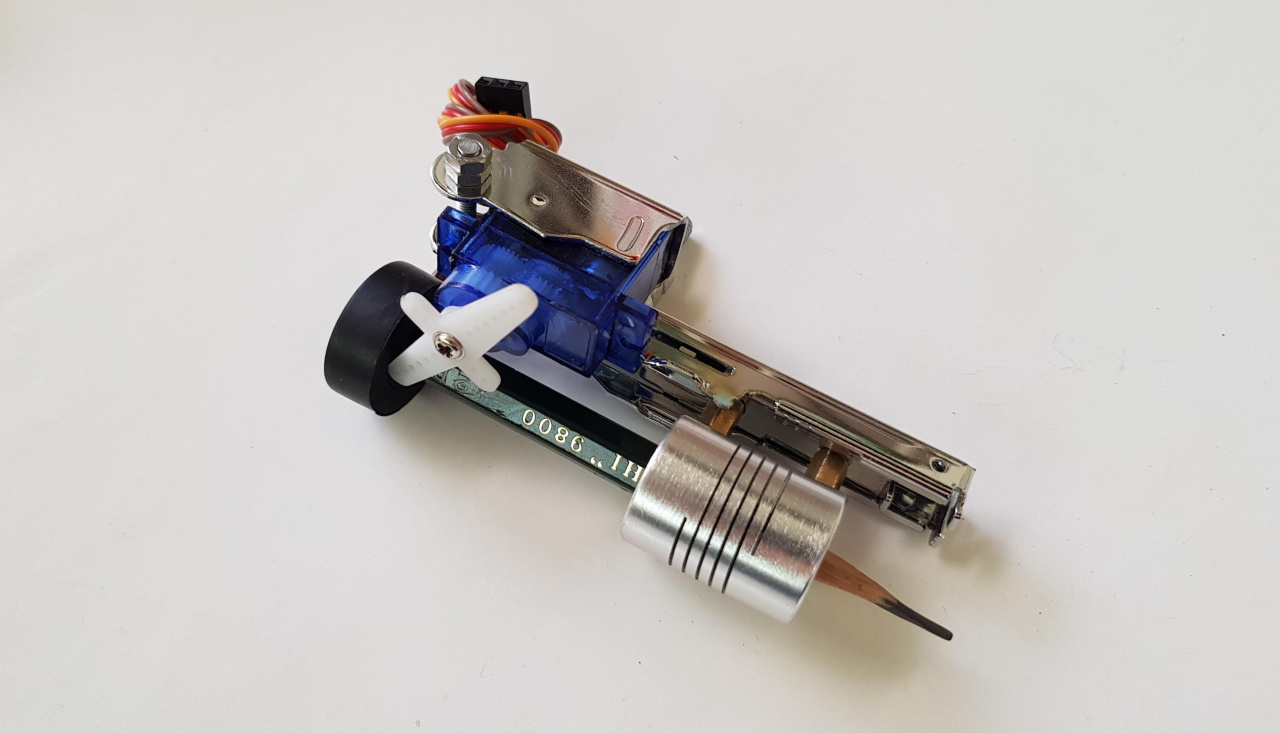
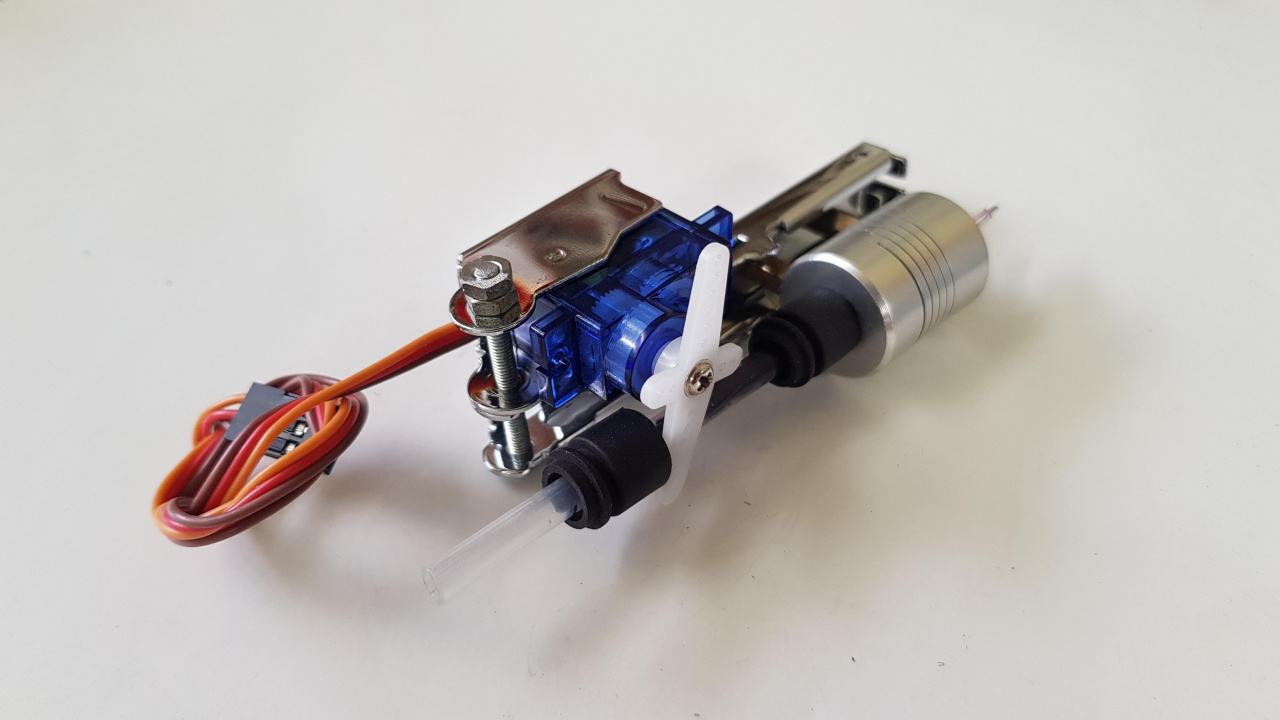
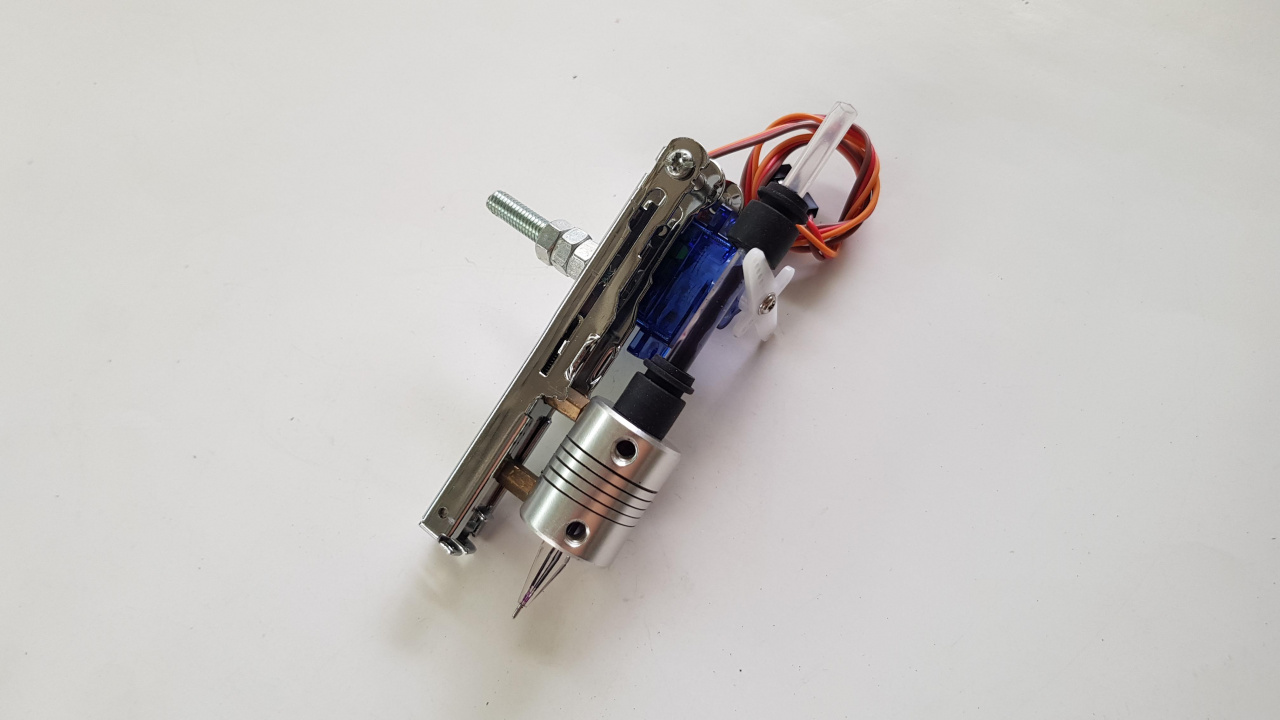
Установка оси Z:
Когда я использовал степлеры в своем офисе, мне пришла в голову идея, что я могу использовать степлер как механическую часть для подъема ручки. И как показала практика это оказалось хорошей идеей. Если у вас возникли проблемы с подъемником ручки мини-плоттера с ЧПУ, вы можете обратиться к моим инструкциям ниже. Это легко сделать из имеющихся канцелярских товаров.
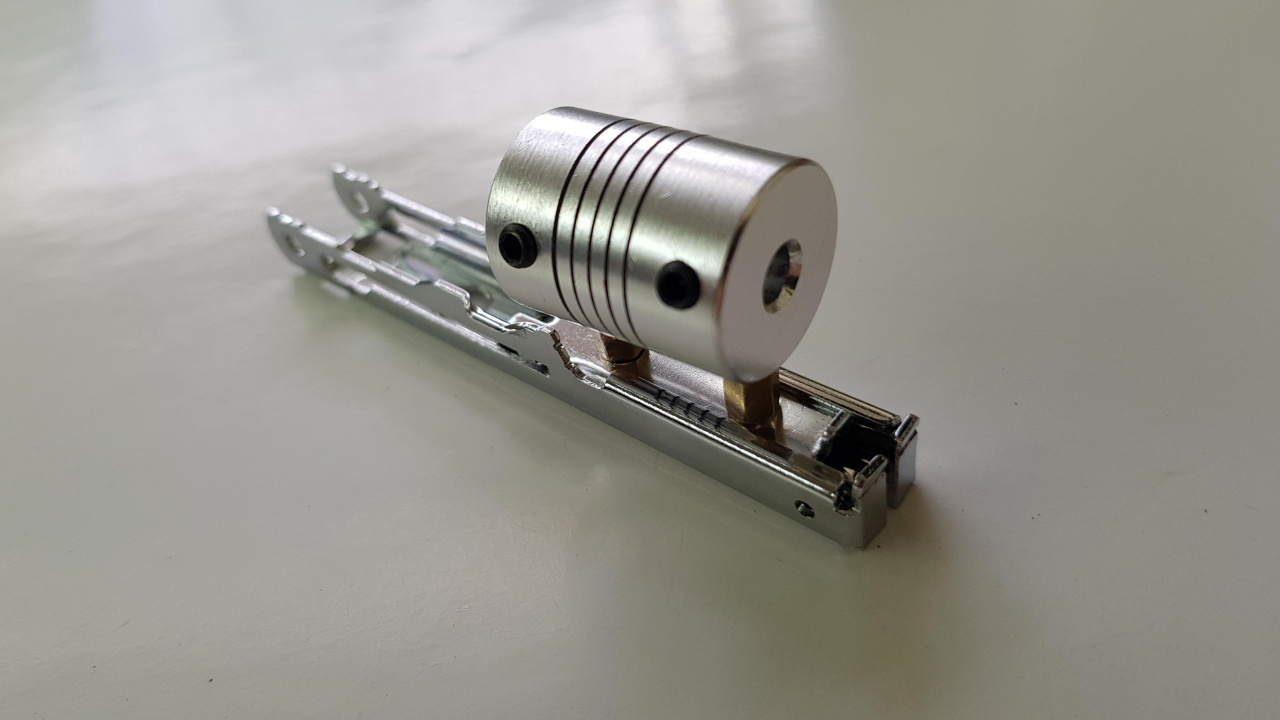
В этом проекте я использовал пружинный механизм степлера для перемещения пера вверх и вниз по оси Z.




MIGRBL отличается от оригинального GRBL тем, что MIGRBL настроен для плат расширения CNC, у которых оси X и Y подключены к 2 шаговым двигателям, а ось Z подключена к серводвигателю RC для подъема/опускания ручки.
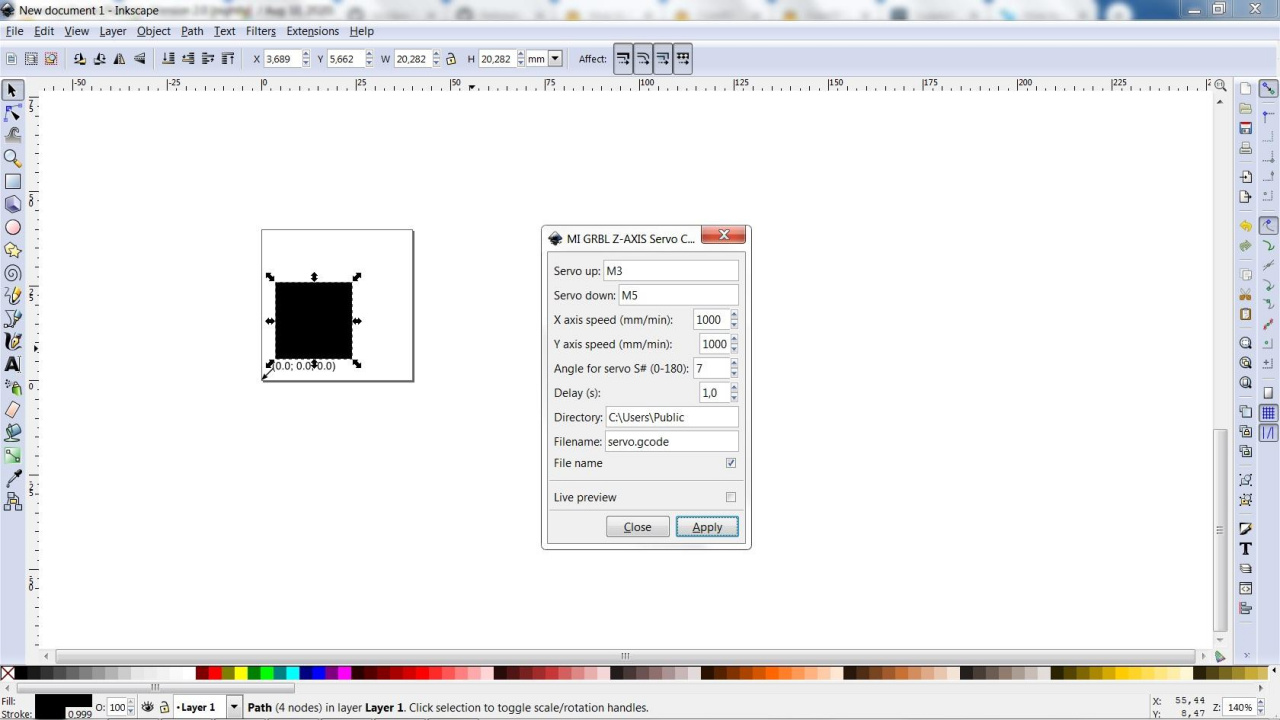
Я использовал программу INKSCAPE для создания G-кода.
Поскольку я использовал прошивку MIGRBL для Arduino Nano (подключенную к плате расширения v4.0) для этого мини-плоттера с ЧПУ и Axis Z, подъем пера управляется серводвигателем RC, поэтому обычный G-CODE, созданный из INKSCAPE, не будет работать. Для того, чтобы он заработал, делаем следующие шаги:
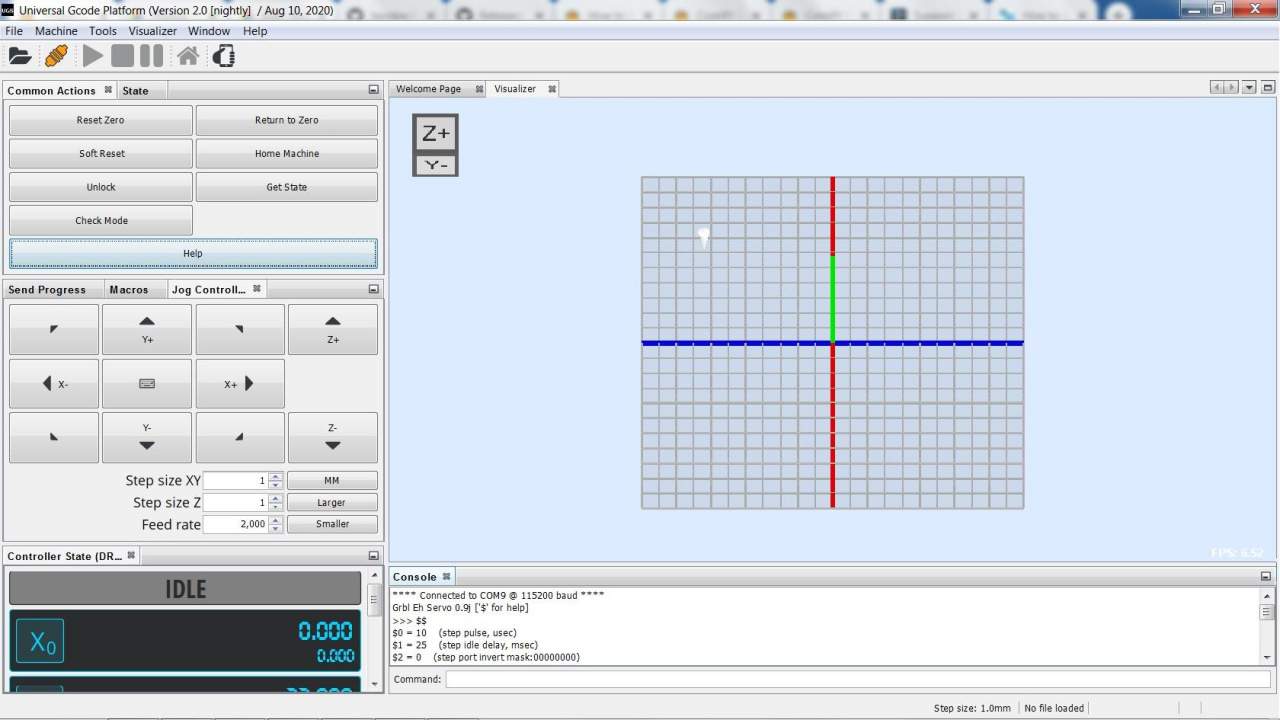
После того, как у нас есть исполняемый файл G-кода из INKSCAPE, для потоковой передачи и отправки файла G-CODE в Arduino Nano мы можем использовать Universal Gcode Sender - UGS.
Steps/mm: Сообщает GRBL, сколько шагов необходимо, чтобы переместить машину на заданное расстояние.
Шаг/мм =(Шаг на оборот)x(Микрошаги)/(мм на оборот).| Общая длина винта, мм | 51,56 |
| Рабочая длина шнека, мм | 40.00 |
| Количество ниток в рабочей длине | 13 |
| Угол шага, ° | 18 |
| Количество шагов, необходимых для того, чтобы шаговый двигатель DVD совершил 1 полный оборот, шаг/оборот | 20 |
| Настройка микрошагов A4988: | 8 |
| Шаг винта шагового привода DVD (мм/оборот): | 3.0 |
| ШАГ/ММ: | 53,333 |
Согласно спецификации шаг винта шагового двигателя DVD/CD составляет 3 мм. Мы можем проверить, измерив рабочую длину винта: 40 мм и посчитав количество резьбы в этом рабочем диапазоне: 14. Шаг винта можно оценить следующим образом:
ШАГ = 40/13 = 3 мм.
Моя последняя калибровка:
Эти приведенные выше значения в точности были подтверждены моими тестами.
Мы могли бы обратить внимание на следующие шаги, прежде чем запускать мини-плоттер с ЧПУ.
Мы можем изменить направление движения оси без изменения проводки в Axis Direction $3. Из-за устройства моих шаговых двигателей мне пришлось изменить направление шагового двигателя по оси Y, поэтому мое значение настройки было: $3 = 2 . См. Таблицу конфигурации осей ниже.
| Значение настройки | Обратный X | Обратный Y | Обратный Z |
| 0 | 0 | 0 | 0 |
| 1 | 1 | 0 | 0 |
| 2 | 0 | 1 | 0 |
| 3 |
1 | 1 | 0 |
| 4 | 0 | 0 | 1 |
| 5 | 1 | 0 | 1 |
| 6 | 0 | 1 | 1 |
| 7 | 1 | 1 | 1 |
Мои настройки показаны на картинке ниже:
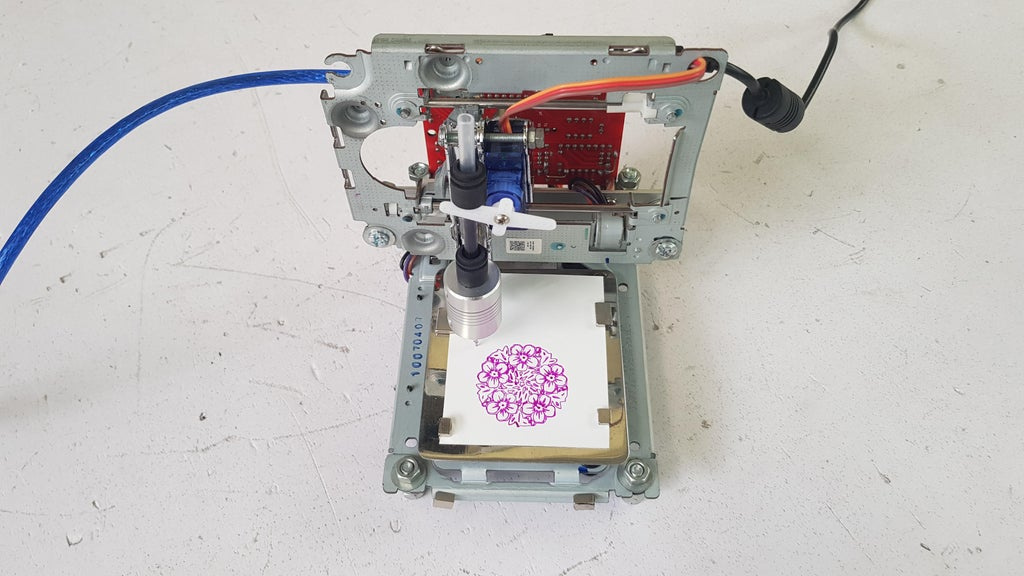
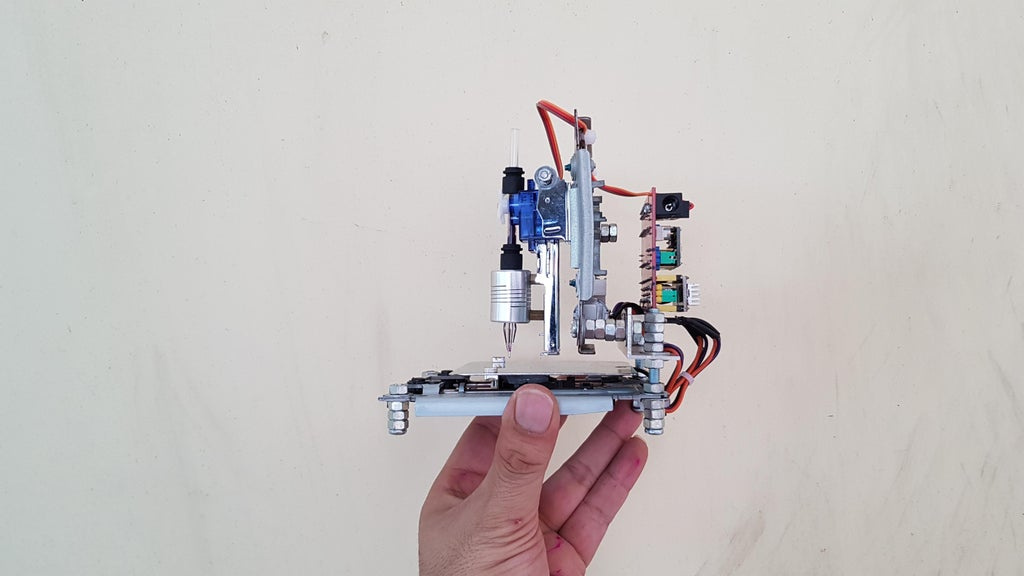

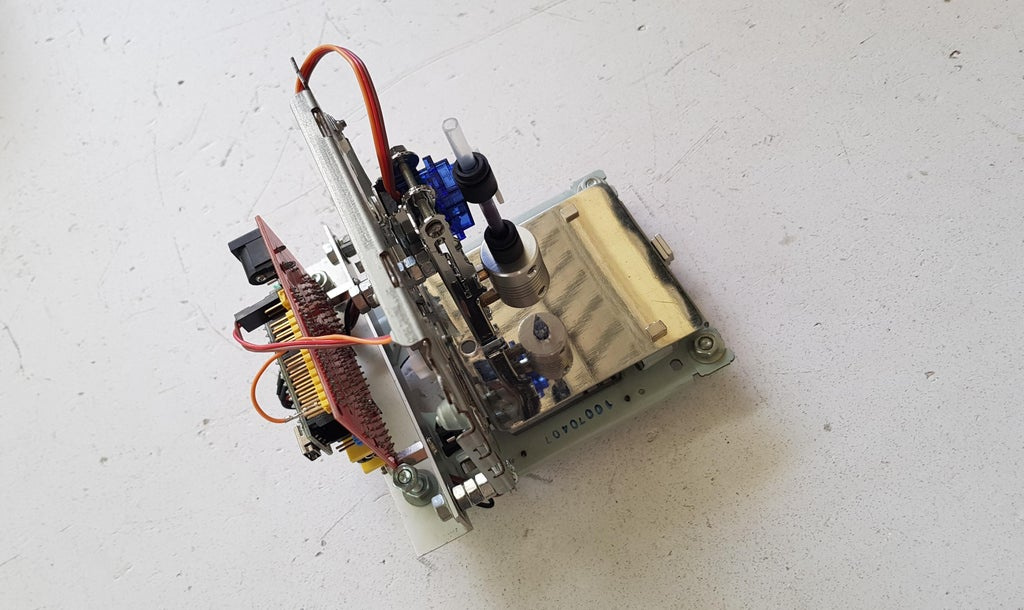
На фотографиях выше вы можете убедиться, что данный мини-плоттер с ЧПУ работает довольно хорошо. При желании его можно настроить более точно.
 93
93
Фрезерно-гравировальный станок с ЧПУ WoodTec MH 6090
Размер обработки: 600х900х150 мм Мощность электрошпинделя (принудительное воздушное охлаждение) : 1,5 кВт Масса: 255 кг
384 759 ₽

Фрезерный станок с ЧПУ TS 1515L (3,2 кВт)
Рабочая зона (X*Y) – 1530*1530 мм; Макс. частота вращения шпинделя – 24 000 об/мин.; Двигатель привода X,Y, Z, шаговый; Габариты станка (ДxШxВ) – 2700x2300x1900 мм.
516 361 ₽

Фрезерный станок с ЧПУ TS 1325 PRO
Станок модели TS 1325 – является фрезерным станком с ЧПУ, и предназначен для обработки дерева, ДСП, МДФ, фанеры, любые полистиролы, искусственный камень, акриловое стекло и оргстекло, модельный пластик. Данный станок используется для выполнения фрезерных работ на плоских заготовках, для гравировальных работ и резьбы по дереву. Применяется для гравировки и раскроя в различных отраслях промышленности, бизнесе и хобби: изготовление мебели и элементов (фасады, кровати, зеркала и др.), ювелирные мастерские, гравировочные мастерские, радиотехника (изготовление плат), изготовление сувениров и скульптур.
Хотите такой стол? Сделайте его на своем фрезере с ЧПУ! + DXF я Вы чмошники скамуниздили у американцев и радуетесь!! хоть...
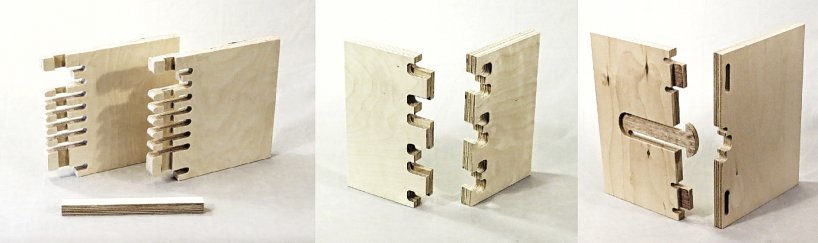
Коллекция головоломок сделанных с помощью лазерно-гравировального станка [макеты для резки прилагаются] Владимир Спасибо за статью! А мы вот сделали stickercut для...
Черные и цветные металлы: различия и области применения Артём монстр трак
18 различных типов металла — факты и применение Ра Просто восхитительно, спасибо)
Лучшие контроллеры ЧПУ для фрезерных, токарных и плазменных станков [Часть 2] Виктор Если вас интересует контроллер для гравировки орнамента ....
Строим фрезерный станок с ЧПУ своими руками [Схемы + Чертежи] Николай Семеновых, Санкт-Петербу Меня интересуют вопросы самодельного 3D-принтера для...








 Фрезерование на станках с ЧПУ – Подробно про процесс, станки и операции
Фрезерование на станках с ЧПУ – Подробно про процесс, станки и операции 10 лучших систем ЧПУ в мире
10 лучших систем ЧПУ в мире Черные и цветные металлы: различия и области применения
Черные и цветные металлы: различия и области применения Почему латунь, бронза и медь зеленеют?
Почему латунь, бронза и медь зеленеют? Область применения и интересные факты о меди
Область применения и интересные факты о меди![12 методов изготовления изделий из пластика и примеры их использования [Часть 1]](https://www.stankoff.ru/files/blog/5EajrhQ1N1mq4SMdzLrhvVL5YMvbtkJ4cte2ZkwP-sm.jpg) 12 методов изготовления изделий из пластика и примеры их использования [Часть 1]
12 методов изготовления изделий из пластика и примеры их использования [Часть 1] Лазерная очистка металла: принцип, характеристики и применение
Лазерная очистка металла: принцип, характеристики и применение Виды лазеров: 4 метода классификации
Виды лазеров: 4 метода классификации![Различные виды литья металлов преимущества и недостатки [Часть 1]](https://www.stankoff.ru/files/blog/qc7Dq4L4qo134CGGvQjiCfGdKsJDrGmMj9wYlh2m-sm.webp) Различные виды литья металлов преимущества и недостатки [Часть 1]
Различные виды литья металлов преимущества и недостатки [Часть 1] Муфты — назначения, типы и факторы выбора
Муфты — назначения, типы и факторы выбора![Что такое отжиг? [7 видов процесса отжига]](https://www.stankoff.ru/files/blog/ItTTmsvBPNripAYsLPzmFCiuSBuoWIRR5FN1TAzS-sm.jpg) Что такое отжиг? [7 видов процесса отжига]
Что такое отжиг? [7 видов процесса отжига] 40 интересных фактов о металлах
40 интересных фактов о металлах 18 различных типов металла — факты и применение
18 различных типов металла — факты и применение Что такое термическая обработка металлов? Методы и преимущества
Что такое термическая обработка металлов? Методы и преимущества![Что такое нержавеющая сталь? [ Часть 2]](https://www.stankoff.ru/files/blog/9gKffNBxwZfKX8xu4XZnh74u77oMWzXw6NreGjCy-sm.jpg) Что такое нержавеющая сталь? [ Часть 2]
Что такое нержавеющая сталь? [ Часть 2]![Гибка листового металла - методы и советы по проектированию [часть 1]](https://www.stankoff.ru/files/blog/GO1VKbFFRkZ2mP57FYJnZACDplzbp67kVwrumTJf-sm.jpg) Гибка листового металла - методы и советы по проектированию [часть 1]
Гибка листового металла - методы и советы по проектированию [часть 1] Почему каждый инженер должен использовать САПР?
Почему каждый инженер должен использовать САПР? Токарная обработка с ЧПУ - процессы, операции и оборудование часть 2
Токарная обработка с ЧПУ - процессы, операции и оборудование часть 2 Как работает плазменная резка? Преимущества и недостатки
Как работает плазменная резка? Преимущества и недостатки Как собрать самодельный фрезерный станок с ЧПУ + Чертежи и схемы!
Как собрать самодельный фрезерный станок с ЧПУ + Чертежи и схемы!
Крутое решение. Но нужно понимать что тут нужные прямые руки и очень хорошие мозги в робототехнике. Так как без этого нельзя не сделать, не обслуживать.
Согласен с вами, что прямые руки тут обязательны. Ну если смотреть инструкцию и делать ровно по ней, то думаю сильных проблем не должно возникнуть.