Диагностика неисправностей цифрового сервопривода трубогибочного станка с ЧПУ
Трубогибочные станки с ЧПУ зарекомендовали себя как надежное оборудование, которое может выполнять сложные изгибы с очень высокой степенью точности, с которой детали ручной формовки просто не могут сравниться. Но и как с любым оборудованием, в ходе эксплуатации данных станков могут возникать проблемы. В этой статье мы подробно рассмотрим одну из таких проблем, связанную с цифровым сервоприводом станка.
Недавно нам написал производитель, который терял по паре часов каждую смену из-за ошибок связанных с одним из своих трубогибочных станков с ЧПУ: "Нам удается обработать несколько деталей, а затем мы получаем сообщение о неисправности каретки!".
Трубогиб, о котором идет речь, - это старый станок, который примерно за полгода до этого был модернизирован новой системой управления BendPro G2. Компания заменила старые аналоговые сервоприводы и двигатели на новые цифровые приводы и сервомоторы от Bosch Rexroth.
Как работают сервоприводы
На трубогибочном станке с ЧПУ движение практически каждого устройства может быть точно позиционировано сервомоторами, которые управляются сервоприводом. Сервопривод - это усилитель, который преобразует электрическое напряжение станка в управляемое напряжение для точного перемещения серводвигателя.
Серводвигатель подает сигнал обратно на привод, который контролирует его скорость и направление. Чтобы знать, в каком направлении и с какой скоростью двигаться, система управления должна предоставлять информацию приводу. Большинство гибочных станков с ЧПУ имеют как минимум два сервомотора, а полностью электрический станок может иметь 12 и более.
Аналоговая и цифровая связь
Аналоговая связь
В аналоговой сервосистеме главная система управления посылает аналоговый сигнал, который определяет скорость и направление движения привода. Сигнал может быть аналоговым с малой силой тока, но наиболее часто используемые системы обеспечивают управляющее напряжение, до 10 положительных вольт постоянного тока или до 10 отрицательных вольт постоянного тока (+/- 10 В постоянного тока). Теоретически, если на привод подается командный сигнал с нулевым напряжением, ось должна быть неподвижной. Если система подает +10 вольт, привод должен двигаться с полной скоростью в одном направлении; если -10 вольт, он должен двигаться с полной скоростью в противоположном направлении; если 5 вольт, он должен двигаться с половинной скоростью; и так далее.
Привод преобразует любое подаваемое командное напряжение в относительную скорость и направление оси. Затем привод контролирует это напряжение, чтобы убедиться, что серводвигатель выполняет правильную скорость и направление.
Обратная связь по положению и скорости также поступает в систему управления; привод может посылать сигнал, который имитирует сигнал обратной связи двигателя, или может быть второй энкодер, который отслеживает данные о положении оси. Система управления использует эту обратную связь для корректировки аналогового сигнала напряжения для точного управления осью.
Привод и система управления также должны иметь несколько дополнительных входов и выходов для передачи друг другу данных о состоянии. Система управления посылает сигнал разрешения, указывающий на то, что привод может перемещать ось, а привод подает сигнал OK, который сообщает блоку управления об отсутствии проблем с его внутренними системами или двигателем.
Кроме того, в качестве меры безопасности, когда система управления не готова к перемещению, она обычно не позволяет приводу вообще перемещать ось, используя контактор для отключения основного источника питания от привода или обеспечивая прерывание между приводом и двигателем.
Дополнительный аналоговый сигнал также может быть связан с приводом, чтобы сообщить, какая часть доступной мощности двигателя должна быть использована для выполнения движения.
Поскольку все это происходит по ряду проводов и кабелей в станке и шкафу управления, аналоговые системы подвержены электрическим помехам, которые могут вызвать непреднамеренное движение оси. Перерезанный или закороченный кабель также может передавать непредусмотренное напряжение на аналоговые сигналы или препятствовать обратной связи по положению. В крайних случаях ось может бесконтрольно двигаться.
При поиске неисправностей в аналоговой системе специалист должен проверить входы, выходы и командные сигналы с помощью обычного вольтметра. Большинство современных аналоговых приводов имеют небольшой экран, на котором отображается сообщение о состоянии привода. Это может быть простой двухбуквенный код или серия символов и индикаторов. Большинство систем также ведут журнал последних неисправностей.
Эти данные могут оказаться весьма ценными для специалиста, устраняющего неполадки в аналоговой системе. Для получения данных необходимо подключить компьютер непосредственно к приводу и использовать программное обеспечение производителя.
Крис Бреннан, инженер по управлению компании Current Tech (производитель программного обеспечения для гибки труб BendPro), сказал: "Аналоговые приводы часто просто выдают общий сигнал о неисправности привода. Для выяснения фактической неисправности часто приходится открывать двери высоковольтного шкафа, что по соображениям безопасности обычно не разрешается делать операторам".
Цифровая связь
В цифровой сервосистеме привод по-прежнему контролирует скорость и направление вращения двигателя и получает обратную связь от двигателя, подтверждающую, что он передает правильную скорость и направление. Однако команда от системы управления и обратная связь от системы управления передаются по цифровой сети связи.
Производители сервоприводов и систем управления разработали различные протоколы и методы связи между устройствами (например, ProfiBUS, ModBUS, EtherCAT и SERCOS). Все они обеспечивают двустороннюю связь между сервоприводом и системой управления, а также многими другими устройствами, которые могут потребоваться.
В цифровой системе вместо сигнала напряжения или силы тока, передаваемого по проводам для сообщения скорости и направления движения приводу, система управления посылает сигнал, который говорит: "Переместитесь в это положение с этой скоростью", а привод выполняет фактическое движение двигателя. Обратная связь по положению и скорости передается обратно в систему управления по той же цифровой сети тысячи раз в секунду. Поскольку эти системы не зависят от аналогового сигнала, вероятность непреднамеренного движения из-за электрических помех или обрыва или замыкания кабеля гораздо ниже, поэтому риск схода с оси гораздо меньше.
Поскольку привод подключен к цифровой системе связи, гораздо больше информации может быть передано туда и обратно, либо непосредственно в систему управления, либо в программное обеспечение привода. Во время работы привод может контролировать двигатель для получения критических данных, таких как скорость двигателя, расстояние перемещения, фактическое положение, температура двигателя и крутящий момент, необходимый для выполнения движения.
В зависимости от производителя привода и используемых протоколов связи, технический специалист может использовать эти данные для поиска неисправностей, происходящих с конкретной осью, и даже может проверить перемещение двигателя и оси независимо от основной системы управления.
Устранение проблемы
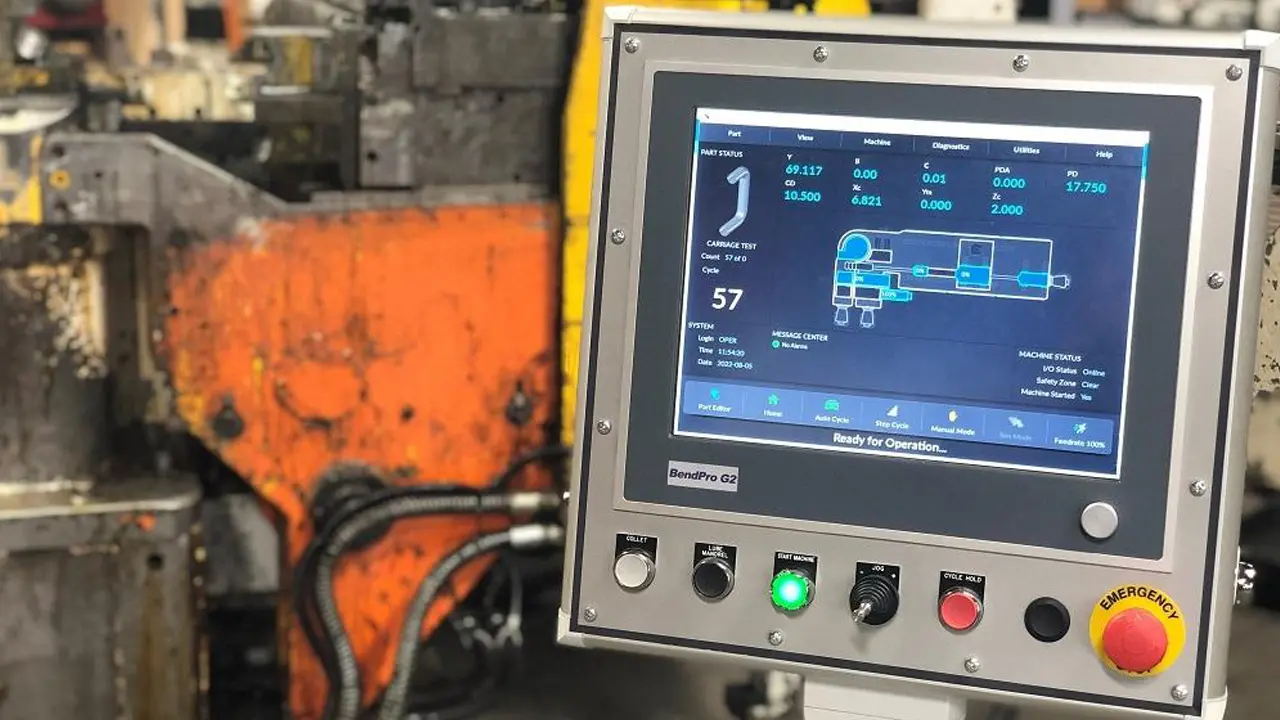
На трубогибе, который смог выполнить только несколько деталей до возникновения ошибки связанной с кареткой, технический специалист RbSA Industrial смог удаленно подключиться к управляющему компьютеру с программным обеспечением для управления трубогибом BendPro G2 и контролировать каретку, пока оператор пытался выполнить обработку деталей. Как правило, во время перемещения оси BendPro отслеживает ее положение и скорость, и движение разрешается только в том случае, если ось остается в пределах определенного положения.
В конце концов, во время производства система управления остановила трубогиб и отобразила ошибку положения оси Y (каретки). После такой ошибки станок можно было перезапустить и изготовить еще несколько деталей, казалось бы, без проблем, прежде чем снова появлялась та же ошибка.
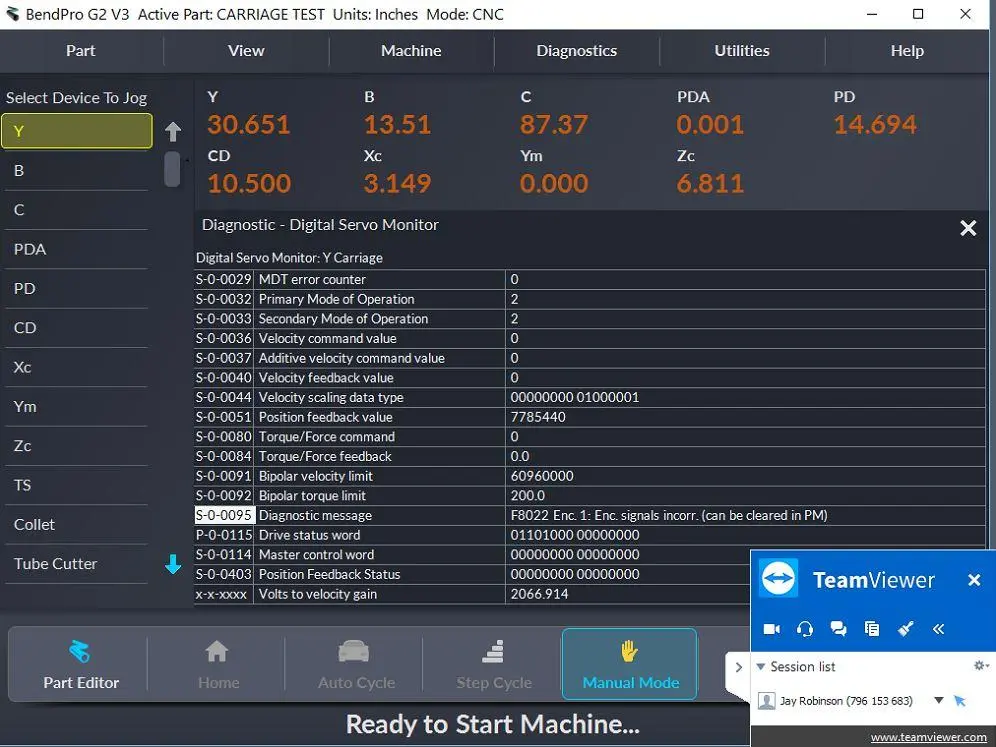
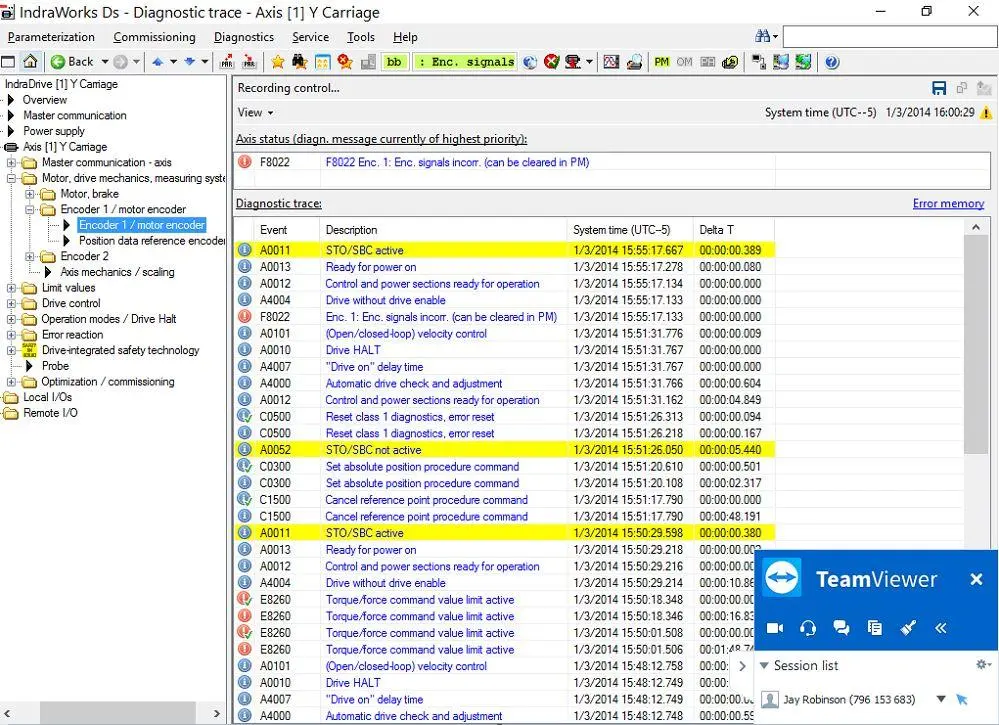
Войдя в компьютер управления, техник также вошел в IndraWorks, пакет программного обеспечения от Bosch Rexroth, который позволяет подключаться к сервосистеме через сеть EtherCAT. Он получил доступ к журналу данных о неисправностях привода и обнаружил серию неисправностей, связанных с перегрузкой по току.
Как правило, серводвигатели рассчитаны на работу с определенным крутящим моментом при определенных скоростях вращения двигателя, и это контролируется и отслеживается приводом. Двигатель должен быть способен работать неограниченное время при крутящем моменте до 100% от номинального. Однако серводвигатель также может работать в течение коротких периодов времени при более высоком крутящем моменте, чтобы обеспечить короткие всплески дополнительной мощности во время определенных операций - например, для ускорения, поддержания скорости и замедления. Если двигатель требует крутящего момента более 100% в течение слишком долгого времени, система привода будет потреблять слишком много электрического тока, что может привести к повреждению привода или двигателя. Прежде чем это произойдет, привод остановит движение оси и перейдет в состояние неисправности.
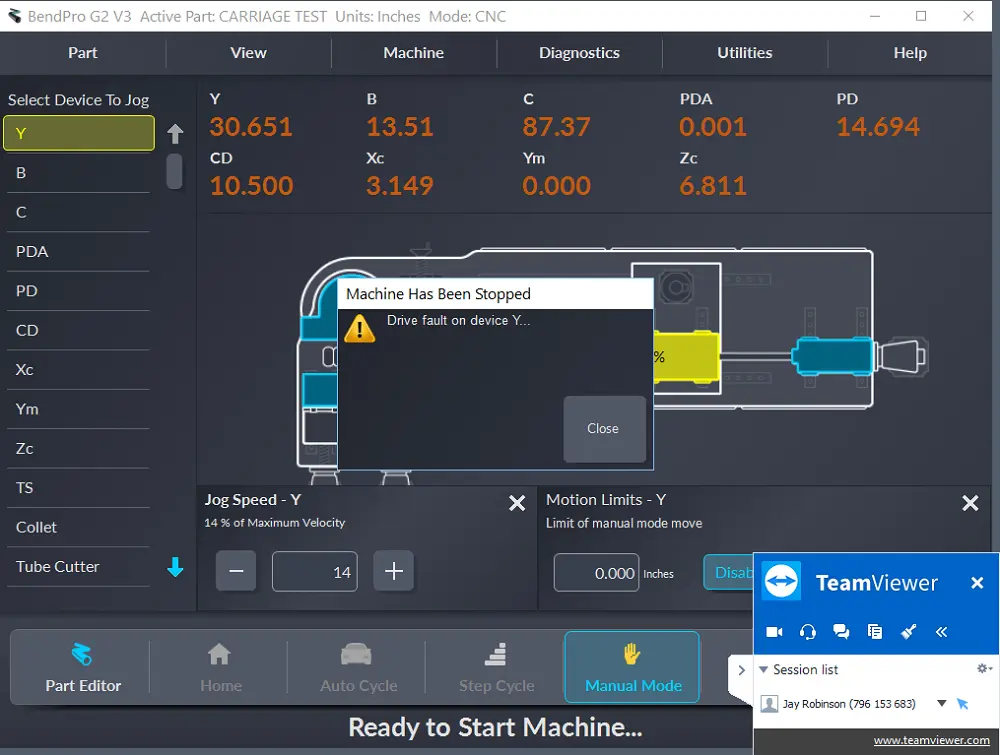
Поскольку оператор продолжал пытаться запустить детали, а техник осуществлял удаленный мониторинг, произошло еще несколько ошибок положения, но через несколько минут вместо ошибки положения BendPro отобразил ошибку оси Y. Привод вышел из строя и передал статус неисправности в систему управления. Быстрая проверка в программе IndraWorks подтвердила, что это снова было состояние перегрузки по току, как и было записано в журнале неисправностей. Программное обеспечение указало на то, что двигатель должен был использовать слишком большой крутящий момент в течение слишком долгого времени.
Контролируя процент крутящего момента, оператор перемещал каретку вперед-назад вдоль машины, используя ручной режим и джойстик на пульте управления, и увидел, что (как и ожидалось) крутящий момент кратковременно превысил 100% номинального допуска при ускорении и замедлении. Затем, после нескольких перемещений по всей длине машины, крутящий момент превысил 200% - и не только во время ускорения, но и во время движения без нагрузки. Это в конечном итоге привело к повторному возникновению неисправности, связанной с перегрузкой по току.
Как выяснилось, один из линейных подшипников, на которых перемещается каретка, вышел из строя и заставлял двигатель работать намного интенсивнее, чем следовало, чтобы позиционировать трубу для следующего изгиба, иногда достаточно сильно отставая от ожидаемого положения, что заставляло систему управления останавливать станок с ошибкой положения. В свою очередь, это иногда приводило к тому, что привод останавливал станок с ошибкой перегрузки по току, предотвращая повреждение двигателя.
К счастью, в отделе технического обслуживания был в наличии подшипник, и им заменили неисправный. Примерно через 20 минут станок снова заработал на полную мощность.
Советуем вам прочитать статьи опубликованные в нашем блоге ранее: «Механический цех зимой: как температура влияет на производительность станков с ЧПУ» и «10 лучших систем ЧПУ в мире».
Если вам понравилась статья, то ставьте лайк, делитесь ею со своими друзьями и оставляйте комментарии!




 Stalex (Китай)
Stalex (Китай)
Мощность двигателя, 2,2 кВт. Диаметр валов, 50 мм. Скорость вращения, 13,0 об/мин.
Комментарии
Оставить комментарий
Популярные статьи





![12 методов изготовления изделий из пластика и примеры их использования [Часть 1]](/i/f/lHDFSosW9fHw-1002n-7caa4118.webp)


![Различные виды литья металлов преимущества и недостатки [Часть 1]](/i/f/Zp8MqYE5adVQ-1002n-183948a6.webp)

![Что такое отжиг? [7 видов процесса отжига]](/i/f/F7YVUHJJ4oeV-1002n-46c8879a.webp)



![Что такое нержавеющая сталь? [ Часть 2]](/i/f/fcD6qyge1EJq-1002n-5e451cbc.webp)
![Гибка листового металла - методы и советы по проектированию [часть 1]](/i/f/017dtMRcvOCk-1002n-f7847a72.webp)