


Всем привет!
Около года назад я хотел купить лазерный CO2 станок, чтобы сделать свое рабочее место полноценным. Одна из проблем заключалась в том, что лазерные резаки недешевы, особенно для любителей, которым нужна большая площадь резки. Конечно, за эту цену вы также получаете отличное программное обеспечение и техническую поддержку клиентов, но когда я начал этот проект мне исполнилось 17 лет, и у меня просто не было таких денег. Вот почему я построил свой собственный лазерный СO2 станок. Это полная пошаговая инструкция, как собрать лазерный резак самому! Я включил в это руководство все файлы, необходимые для его создания.
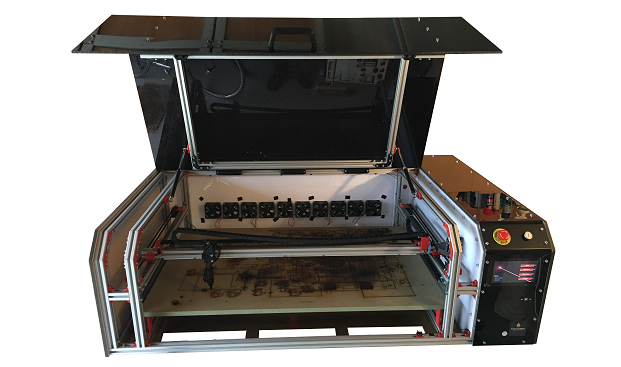
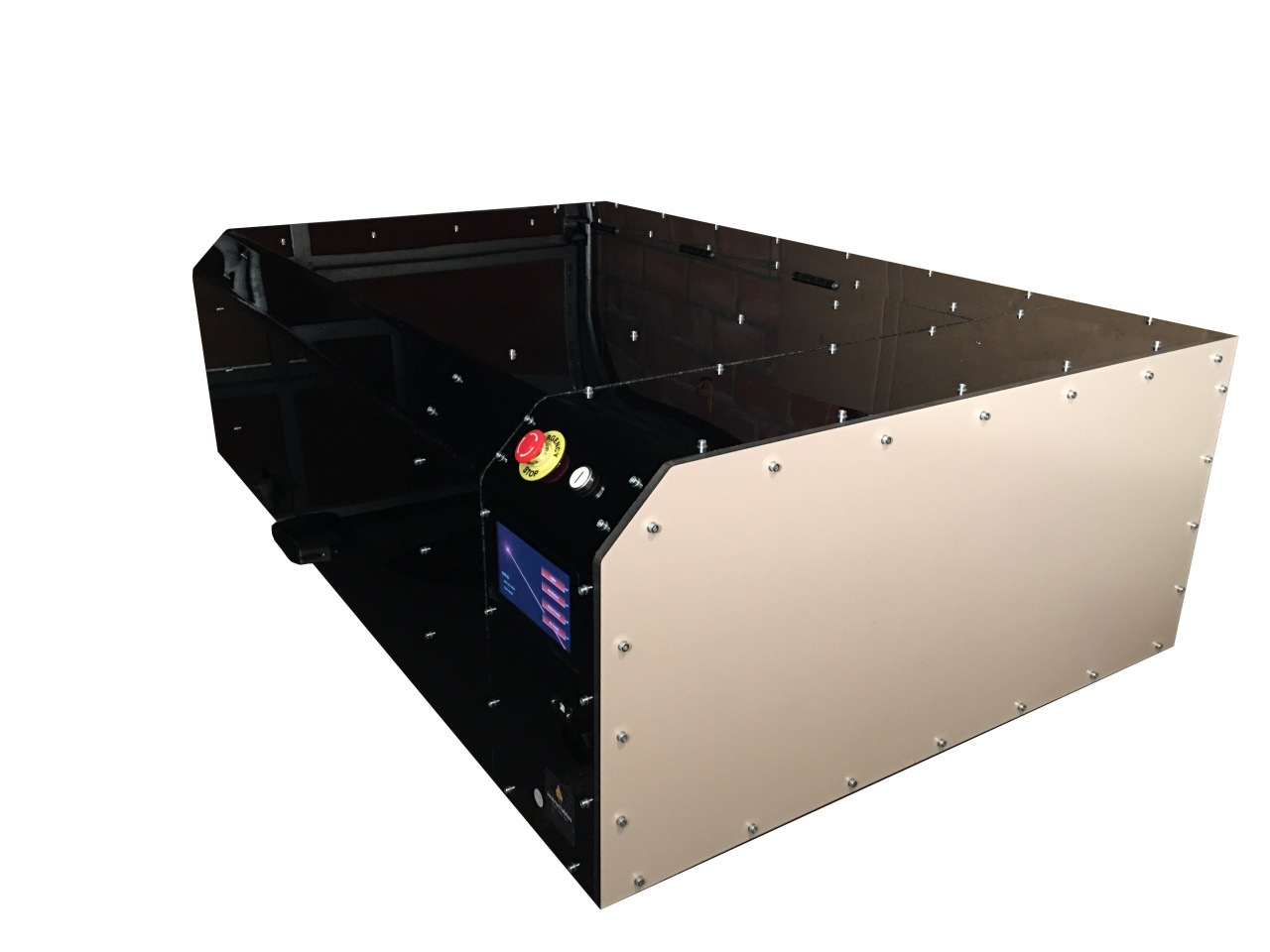
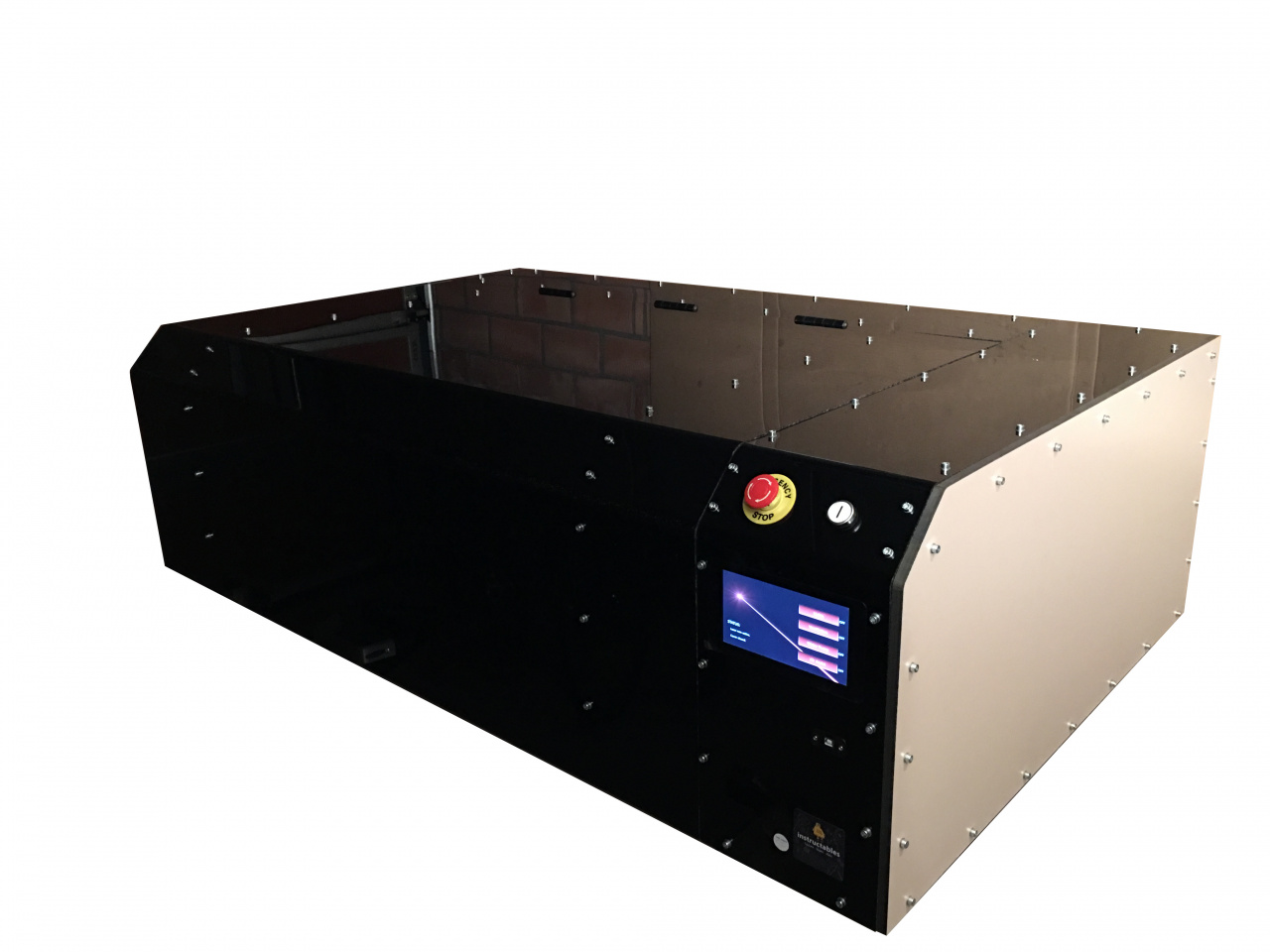
Этот лазерный резак использует лазерную CO2 трубку мощностью 40 Вт, имеет большую площадь резки 1000 на 600 мм и оснащен сенсорным экраном для управления! Весь проект мне обошелся примерно в 170 тысяч рублей, это все равно большие деньги, но я не хотел делать его из лома. Его нужно было построить из высококачественных материалов, чтобы он не развалился за два года. И это все еще очень дешево для лазерного резака с такой большой площадью реза. Кроме того, за эту цену вы получите потрясающий опыт создания собственного лазерного станка и бесценные знания.
Он работает на двух микроконтроллерах, arduino с GRBL и raspberry pi с сенсорным экраном, чтобы сделать его автономным устройством и управлять им. Это означает, что вам не нужен компьютер для отправки файлов на вашу машину. К сожалению, на данный момент у меня нет на это времени, поэтому сенсорный экран теперь используется только для управления дополнительными функциями, такими как освещение, пневматическая система и насос. В будущем я обязательно продолжу работу над этим проектом, чтобы сделать его автономным устройством.
Важно! В этой машине используется лазер мощностью 40 Вт! Я принял все меры предосторожности при проектировании корпуса, и лазер будет активироваться только при закрытой крышке. Всегда используйте защитные очки при проверке лазера. Даже отраженный луч может быть очень опасным для глаза! Я не несу ответственности за возможные несчастные случаи.
Я очень надеюсь, что вам понравятся моя инструкция, и она поможет некоторым из вас построить свой собственный лазерный станок!
Примечание: Данная статья является переводом. Часть файлов доступных для загрузки помимо английского может быть на нидерландском языке.
На этом этапе я расскажу о конструкции этой машины. На этом шаге нет файлов для загрузки. Я добавлю эти файлы на этапах, где я буду рассказывать о сборке или установке отдельных частей лазерного резака. Что касается этого шага, я просто объясню, как и почему я пришел к этому дизайну. Я вдохновлялся внешним видом дизайна лазерного резака серии hobby от Full Spectrum Laser.
Прежде чем сделать набросок того, как должна выглядеть машина, я составил список вещей, которые нужно учитывать при ее проектировании.
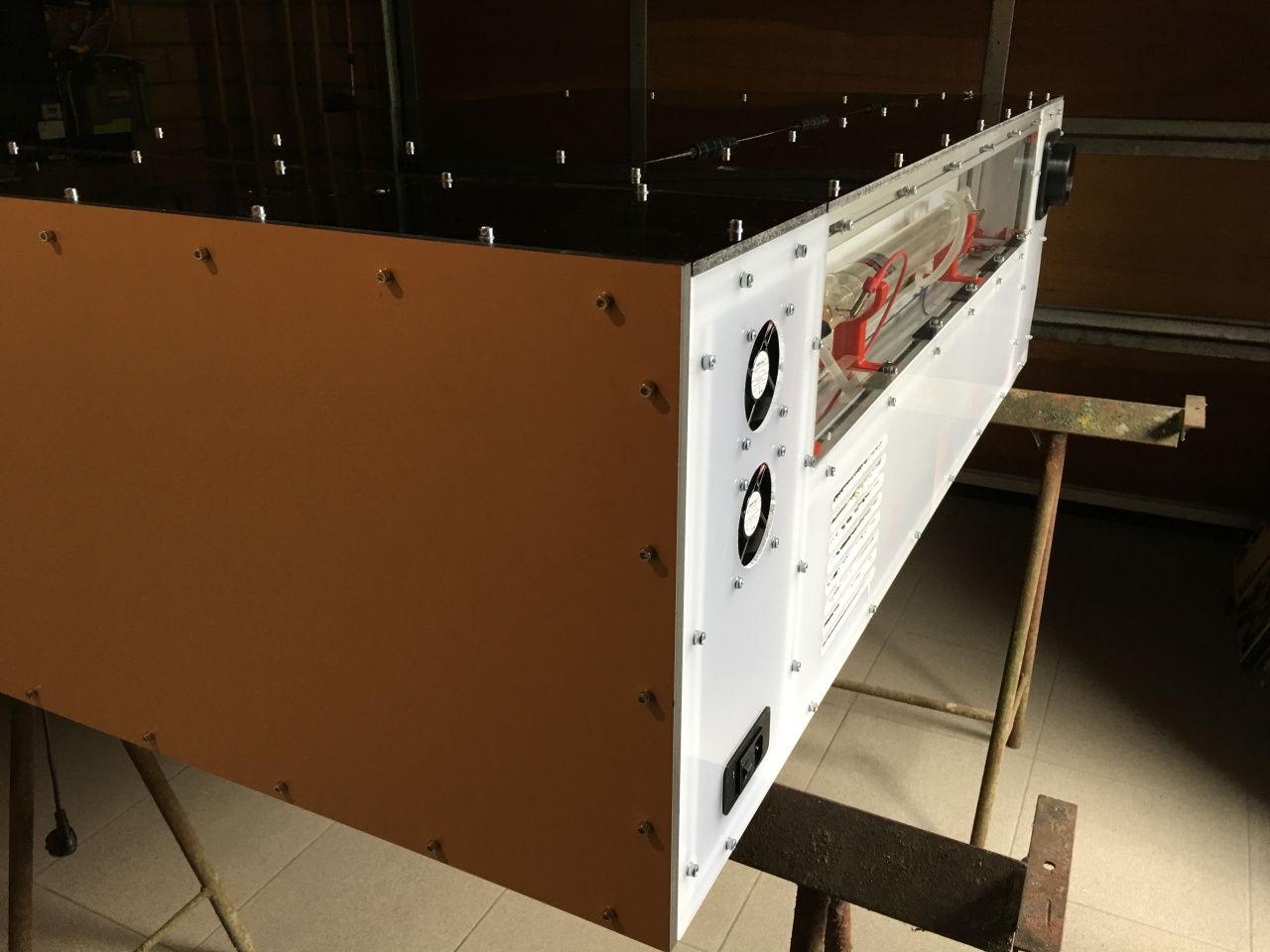
Первое и самое главное безопасность! При создании данной машины не забывайте, что безопасность является приоритетом. Поскольку этот лазерный резак использует CO2-лазер мощностью 40 Вт, очевидно, что лазерный луч и даже его отражения. Должны оставаться внутри станка. Поэтому для чехла машины я использовал темную акриловую пластину. Пластина достаточно прозрачная, чтобы вы могли видеть, что происходит внутри. Для боковых панелей я использовал ламинат высокого давления, потому что он хорошо выглядит и устойчив к лазерному излучению.
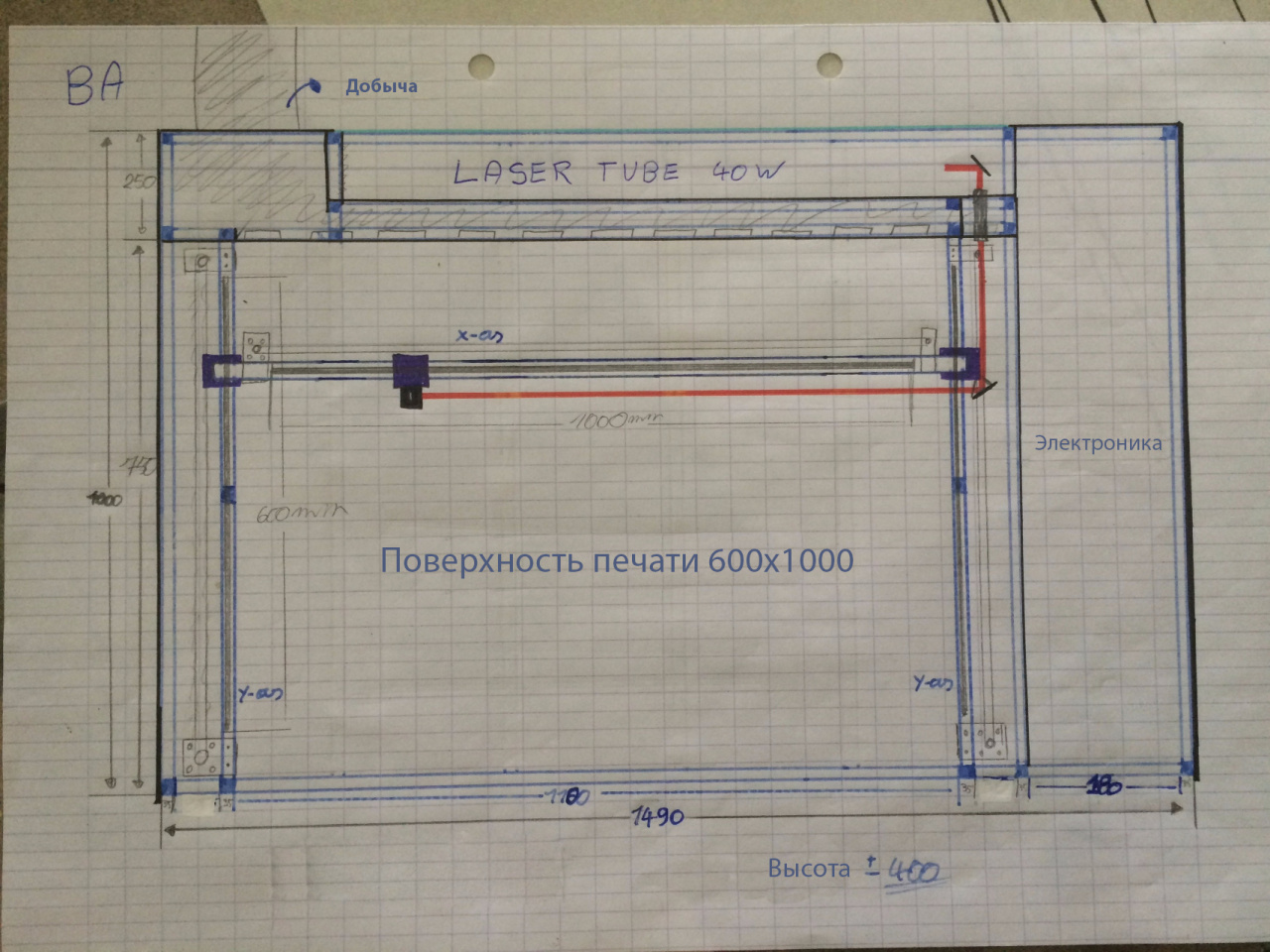
Второй фактор, который я имел в виду, - это размер рабочей зоны и самого резака. Я хотел, чтобы у него была большая площадь реза 600 на 1000 миллиметров. Зачем строить маленькую машину, если можно построить большую? Поскольку это все еще машина, сделанная своими руками, я хотел, чтобы при необходимости было легко заменять или добавлять детали. Поэтому поля всех отдельных «комнат» в машине выбраны немного шире.
Помня о простоте сборки и возможной модификации этого лазерного резака, я решил построить раму из Т-образных алюминиевых 30x30 профилей.
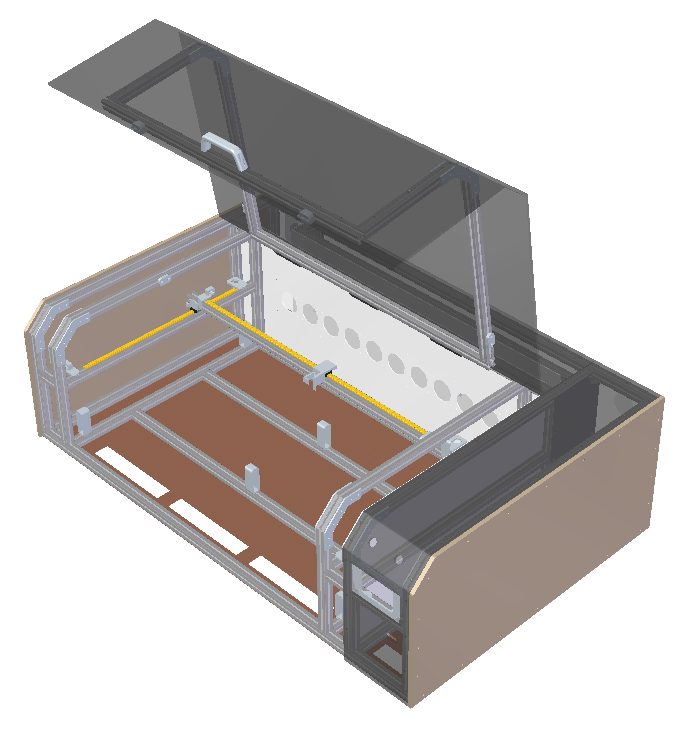
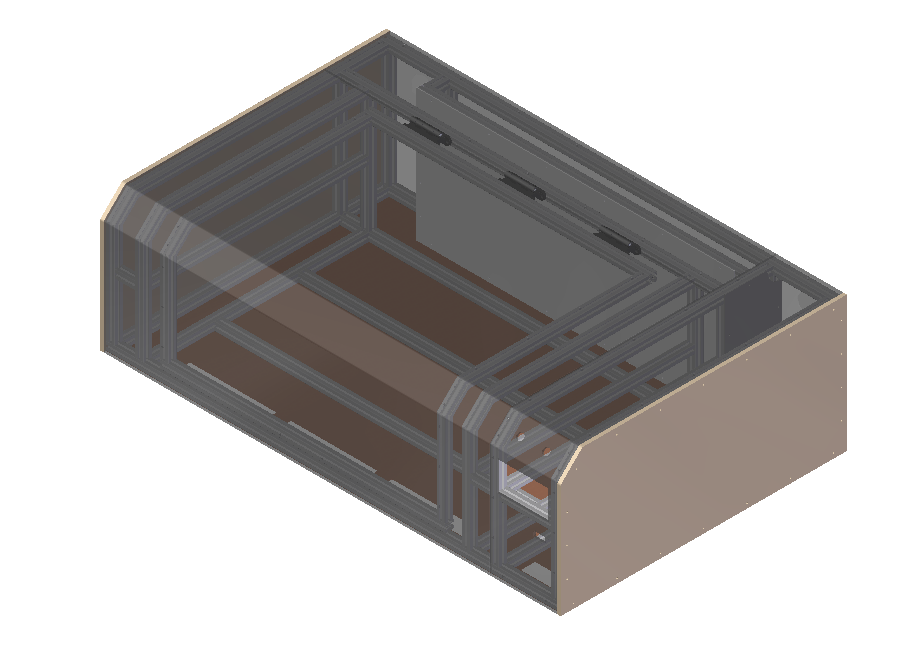
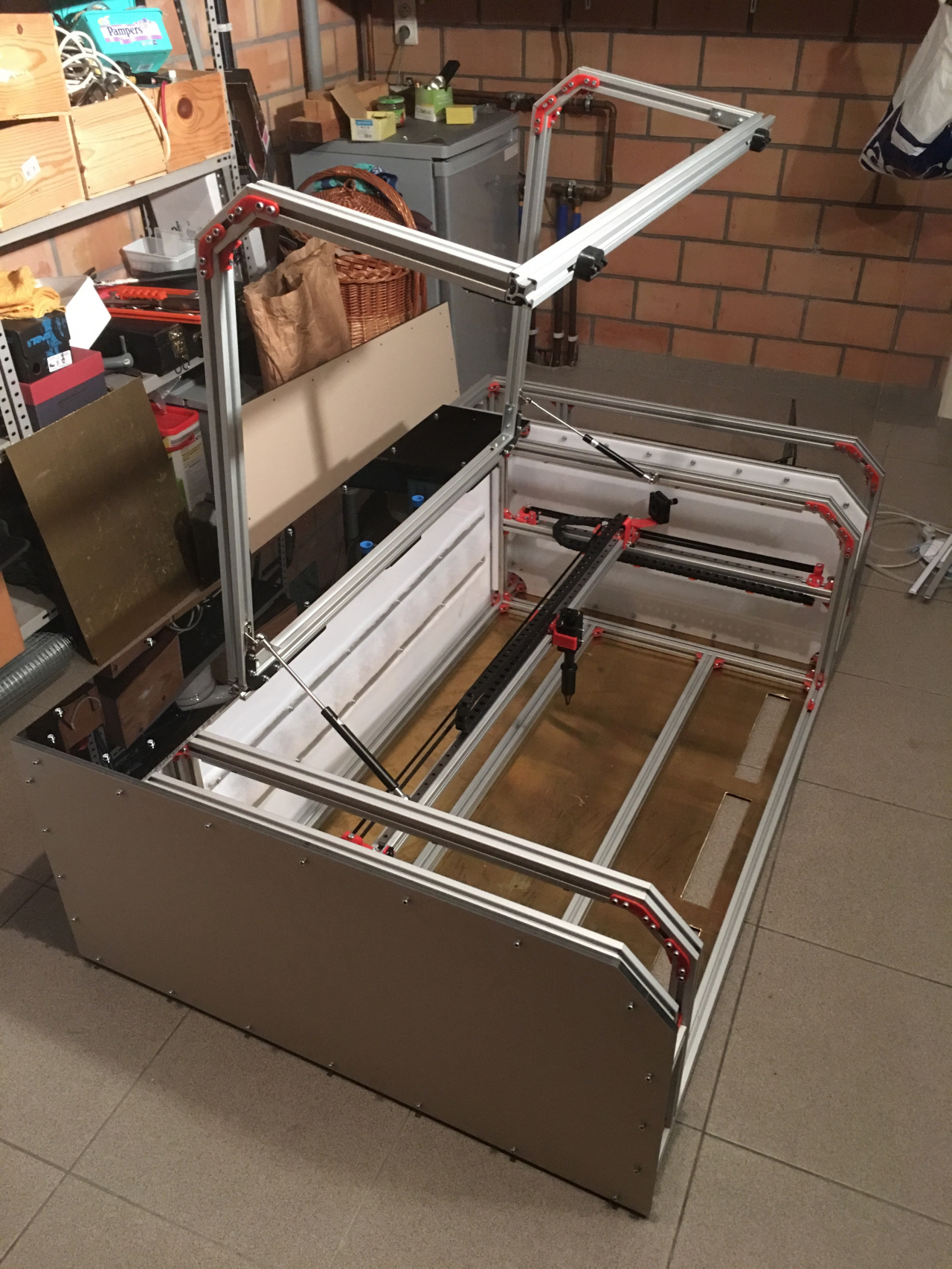
Теперь я объясню базовый дизайн этого проекта. На изображениях этого шага я добавил несколько черновиков, которые показывают вам различные ракурсы каркаса. Конструкция состоит из пяти отдельных мест. Самое большое пространство - это рабочая зона лазерного резака. Пространство сразу за рабочей зоной - это вентиляционная комната, все пары будут всасываться из рабочей зоны в это место и выводиться наружу по вентиляционному шлангу. За вентиляционным помещением расположены два пространства друг над другом. Верхнее пространство - это пространство, куда войдет лазер. Я хотел, чтобы лазер не находился в рабочей зоне, потому что было бы плохо, если бы он был во всех этих парах. Нижнее пространство - это пространство, где будут находиться резервуар для воды и водяной насос, они необходимы для охлаждения лазера. Последняя комната - это пространство справа от машины, где будет вся электроника, драйверы, расходные материалы и сенсорный экран. Отдельные зоны пространства будут разделены акрилом толщиной 3 мм.

Я составил полную ведомость материалов, в которой есть всё необходимое для создания собственного лазерного резака. Большинство запчастей можно заказать на aliexpress, некоторые на ebay. Общая стоимость этих деталей составляет около 161 тысячи рублей. Единственное, что не включено в эту цену, - это стоимость доставки (в общей сложности около 4400 рублей) и нить для 3D-принтера. Я использовал чуть меньше двух рулонов PLA-нити (3600 рублей) для печати всех деталей. Общая стоимость этого потрясающего лазерного резака составляет около 170 тысяч рублей.
В спецификации отдельные пластины не упоминаются, потому что вы получите дополнительную информацию о них на шаге 7. Я потратил в общей сложности около 32 тысяч рублей на эти пластины.
Я также только что упомянул «гайки и болты» в спецификации. Если вы посмотрите на картинку, которую я загрузил на этом этапе, вы увидите, какие именно гайки и болты (с номером DIN) и сколько из них я купил. Я действительно не знаю, сколько из них я использовал, но количество, которое я упомянул, определенно подойдет.
Я выбрал лазерную головку с подвижной линзой, поэтому вы можете настроить расстояние по оси Z между линзой и материалом, который вы хотите вырезать, чтобы правильно установить точку фокусировки.
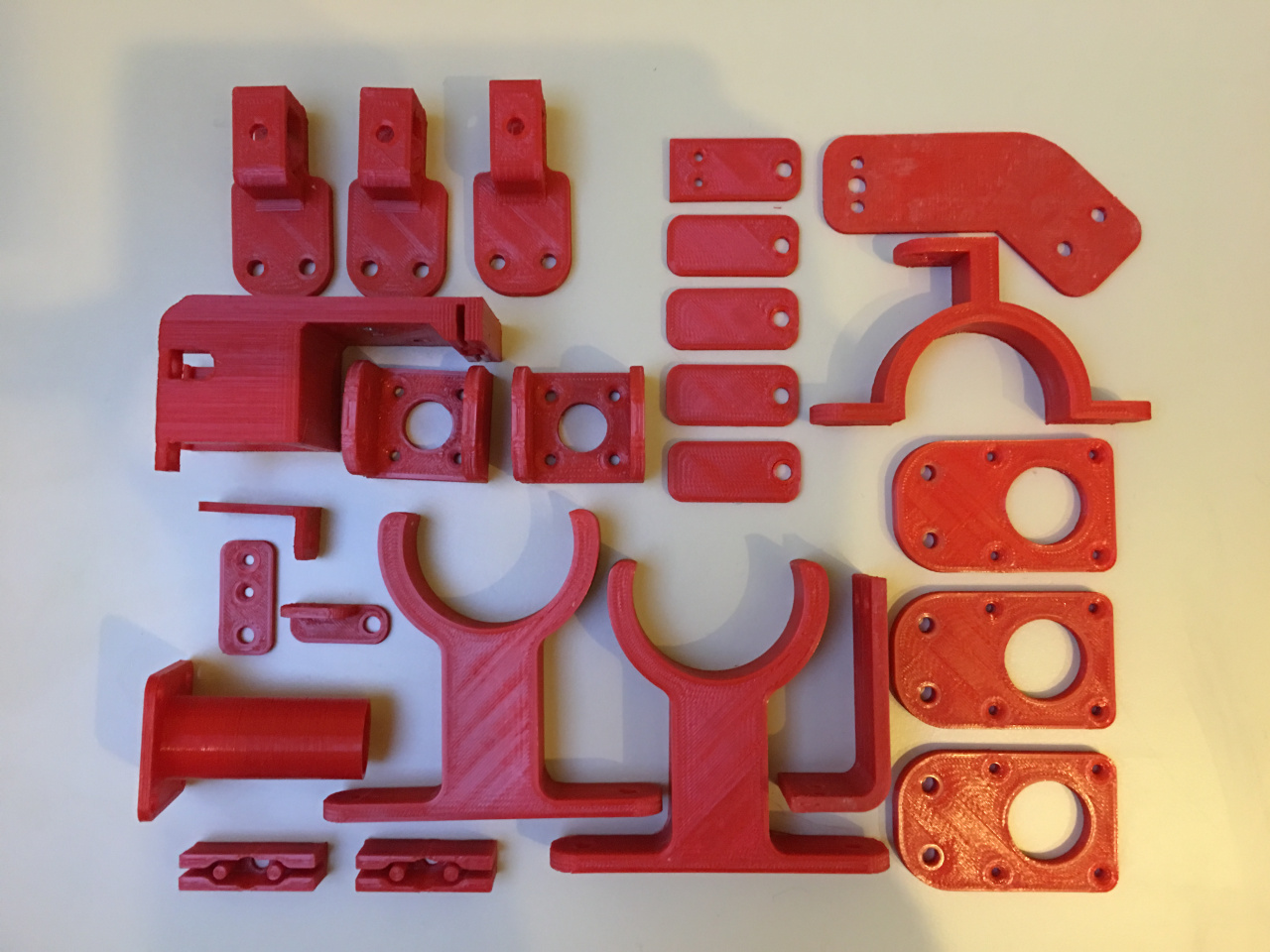
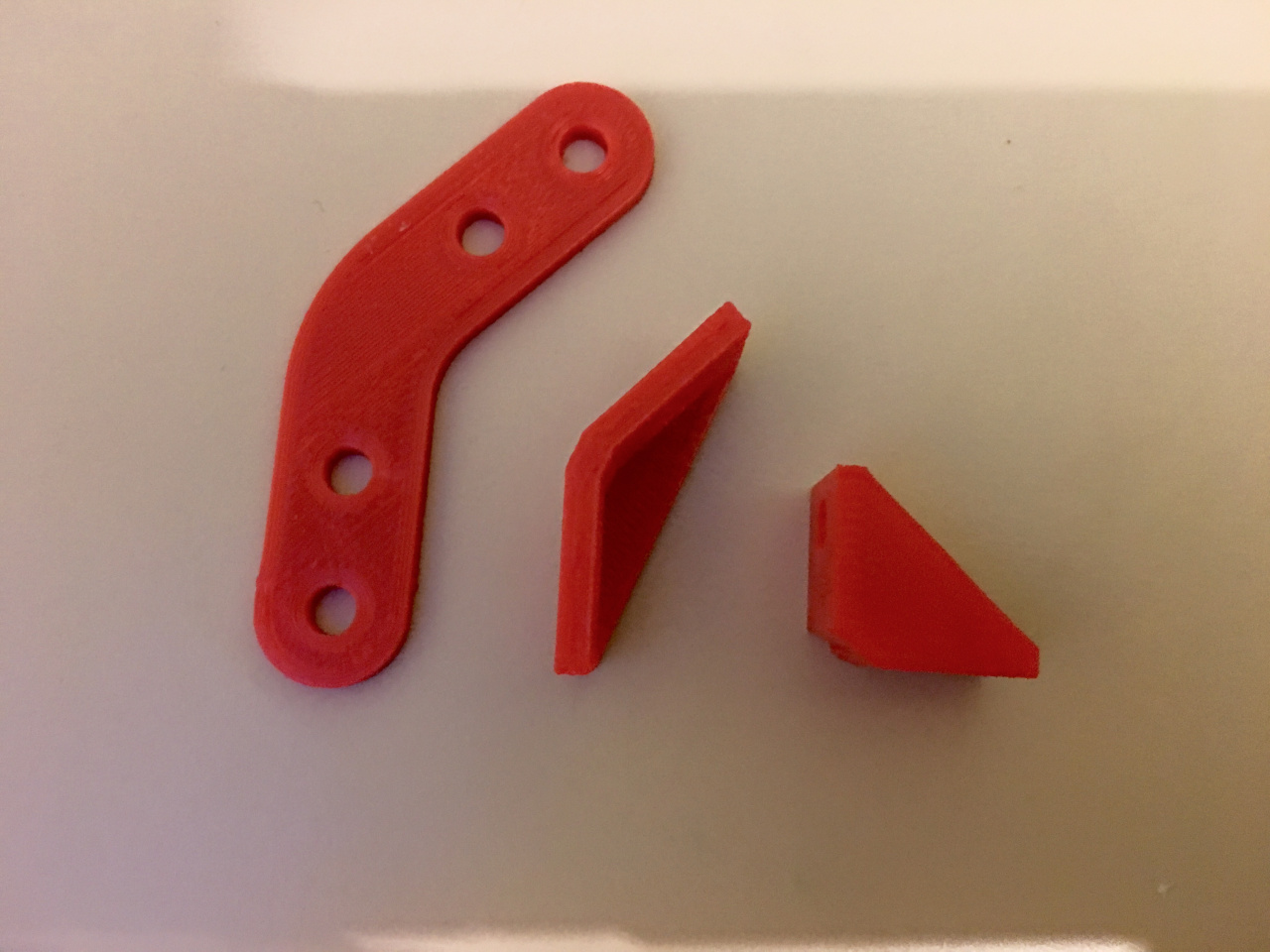
Многие детали этого лазерного резака напечатаны на моем 3D-принтере. Я загрузил все файлы, которые нужно напечатать на 3D-принтере, прежде чем вы сможете начать сборку собственной машины. В названиях этих STL-файлов я упомянул, сколько раз нужно распечатать каждую часть (названия частей написаны на голландском языке).
Вы можете увидеть некоторые из этих частей на фотографии, но не все они на нем представлены.
Цвет деталей на самом деле не имеет значения, но я напечатал все внутренние части красным цветом, а внешние части черным (некоторые внутренние части тоже пришлось напечатать черным, потому, что у меня закончилась красная нить.
Если у вас нет 3D-принтера и вы не знаете никого с принтером, вам не обязательно покупать его самостоятельно. Вы можете просто воспользоваться услугами 3D-печати, такими как 3D-хабы , это очень просто.
Однако 3D-принтер - прекрасное вложение.
 40
40
Лазерно-гравировальный станок по дереву с ЧПУ LM 1625 PRO OPEN 180W
Рабочий стол – 1600х2500 мм. Мощность трубки – 180 Вт. Ресурс – 10 000 моточасов.
1 269 810 ₽
 34
34
Лазерно-гравировальный станок с ЧПУ LM 1390 PRO NEW 130W
Рабочий стол – 1300х900 мм. Мощность трубки – 130 Вт. Ресурс – 10 000 моточасов. Потребляемая мощность – 2 кВт. Вес – 380 кг
590 088 ₽
 79
79
Лазерно-гравировальная машина с ЧПУ LM 9060 PRO 100W
Рабочий стол – 900х600 мм; Мощность трубки – 100 Вт; Ресурс – 10 000 моточасов; Потребляемая мощность – 1,5 кВт: Вес – 340 кг.
522 863 ₽




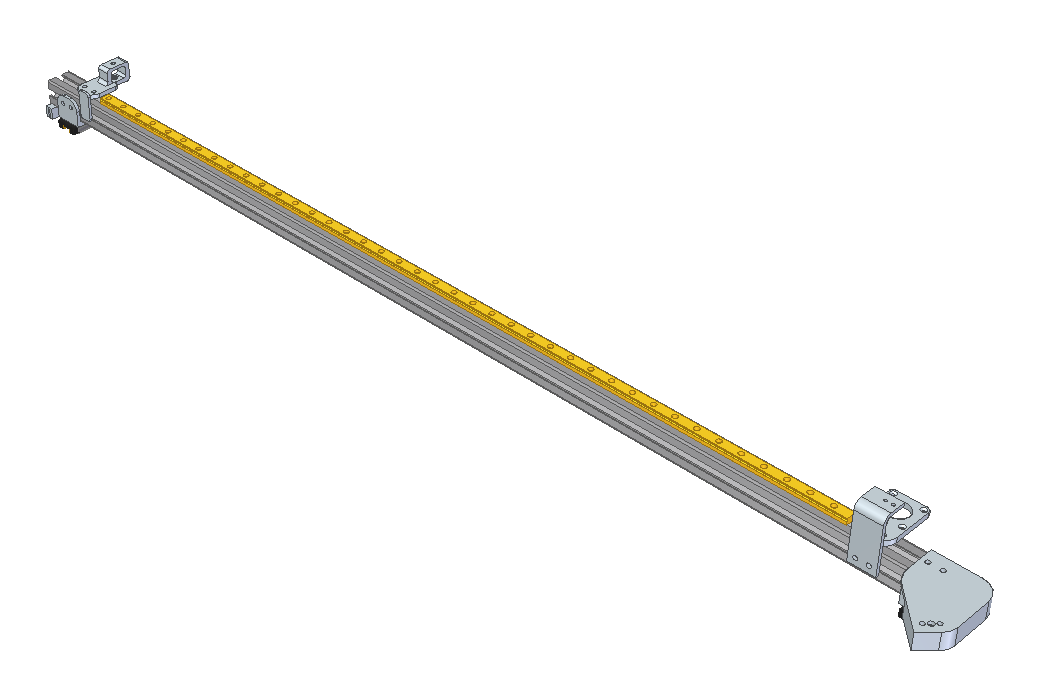
Как я уже упоминал в ведомости материалов, алюминиевые профили длиной 1980 мм я заказал в Германии. Я сделал схему, какие части можно вырезать из каждого профиля. Некоторые профили необходимо разрезать под углом 22,5°, чтобы сделать лицевую панель перед лазерным резаком, в других профилях необходимо просверлить отверстие или нарезать резьбу. Последний нужен для дополнительной прочности рамы. На этом этапе я добавил черновики отредактированных профилей.
Чтобы сделать это вам понадобится пила по металлу. У меня был доступ к циркулярной пиле и ленточной шлифовальной машине, поэтому резка профилей была довольно простой задачей, но для двух человек все равно требовался день работы. Вам просто нужно вырезать профили, как я их вам нарисовал во вложении, и все будет хорошо.


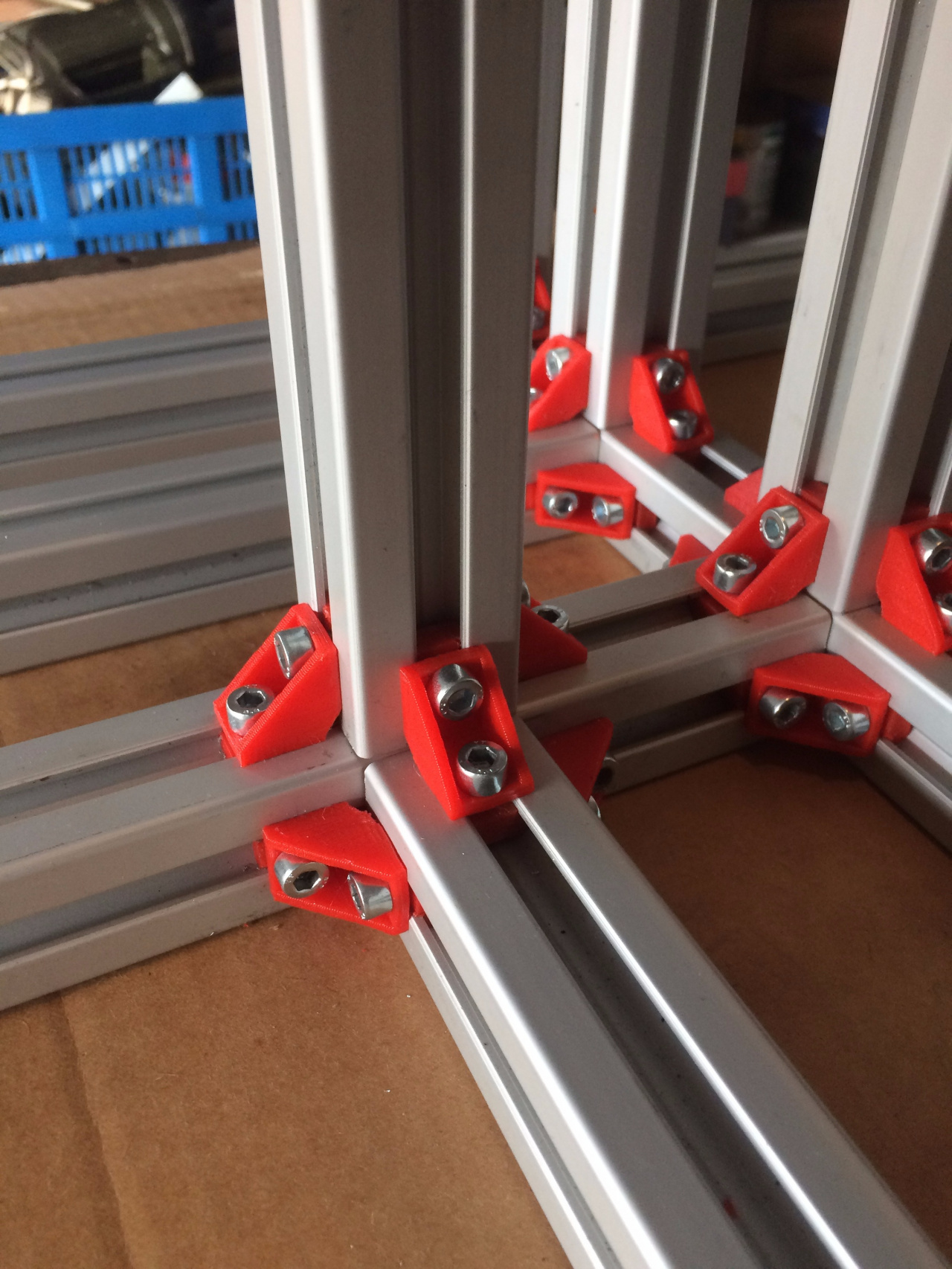



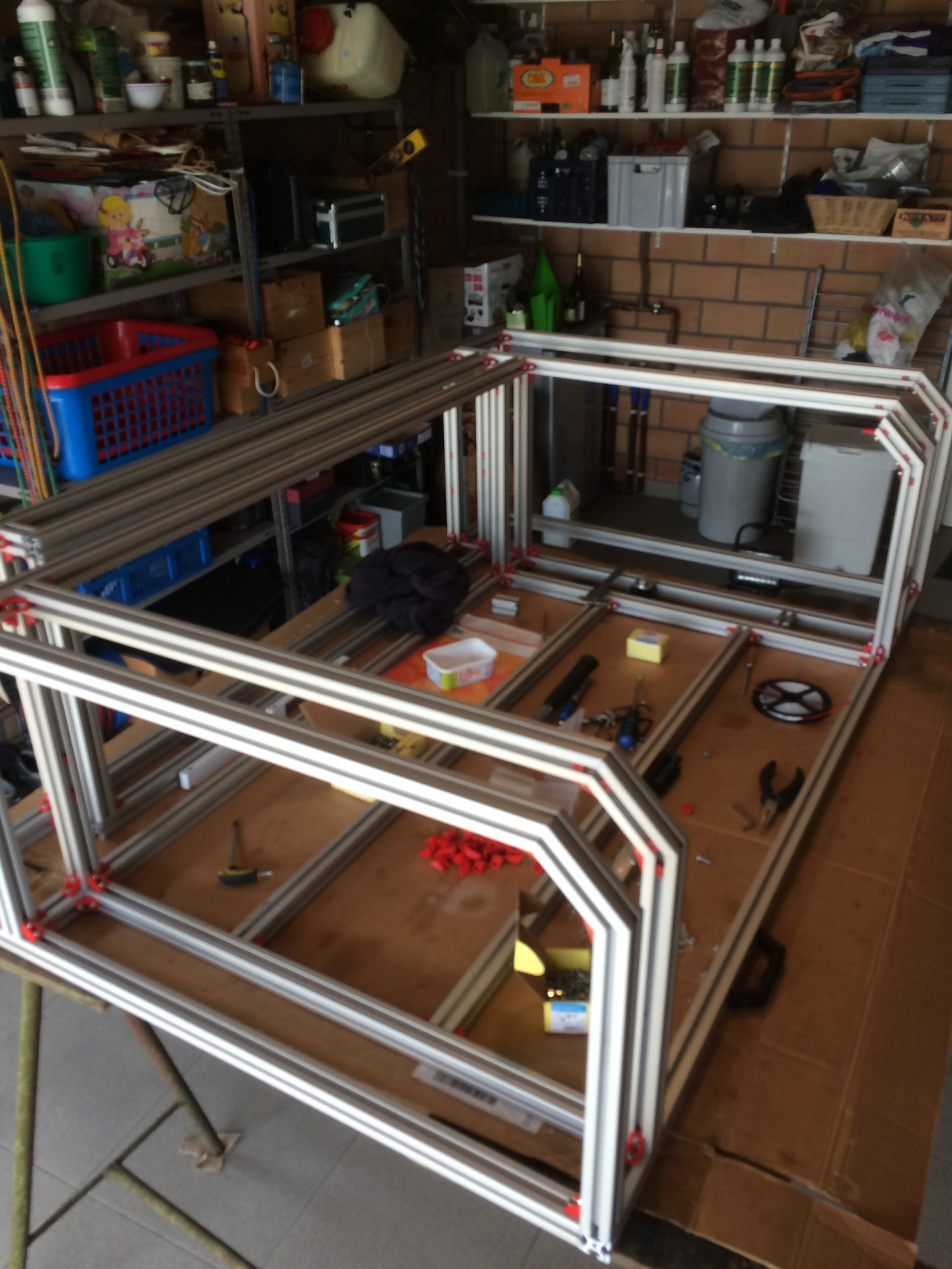
Каркас был собран из деталей, напечатанных на 3D-принтере. Эти детали можно загрузить на шаге 3. Вы можете использовать их или купить железные детали для дополнительной прочности. Также нужно распечатать петли и основание крышки, чтобы собрать кожух.
Чтобы собрать профиль, просто начните со сборки нижних профилей, затем вертикальных профилей, верхних и, наконец, всех средних профилей. Когда все остальное будет сделано, можно будет установить крышку. В приложениях к этому шагу я включил руководство, в котором указано, какие профили необходимо установить и где.
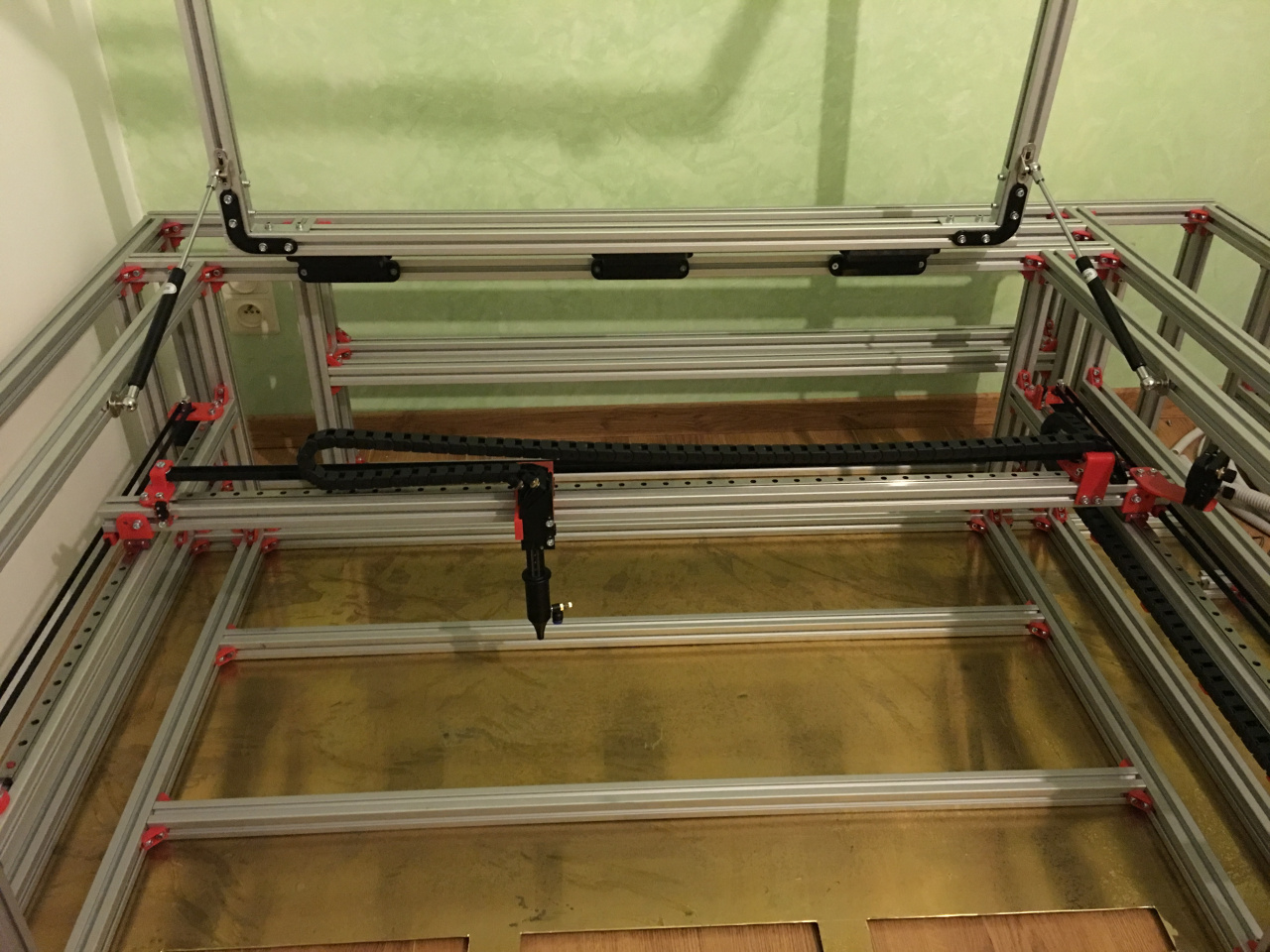

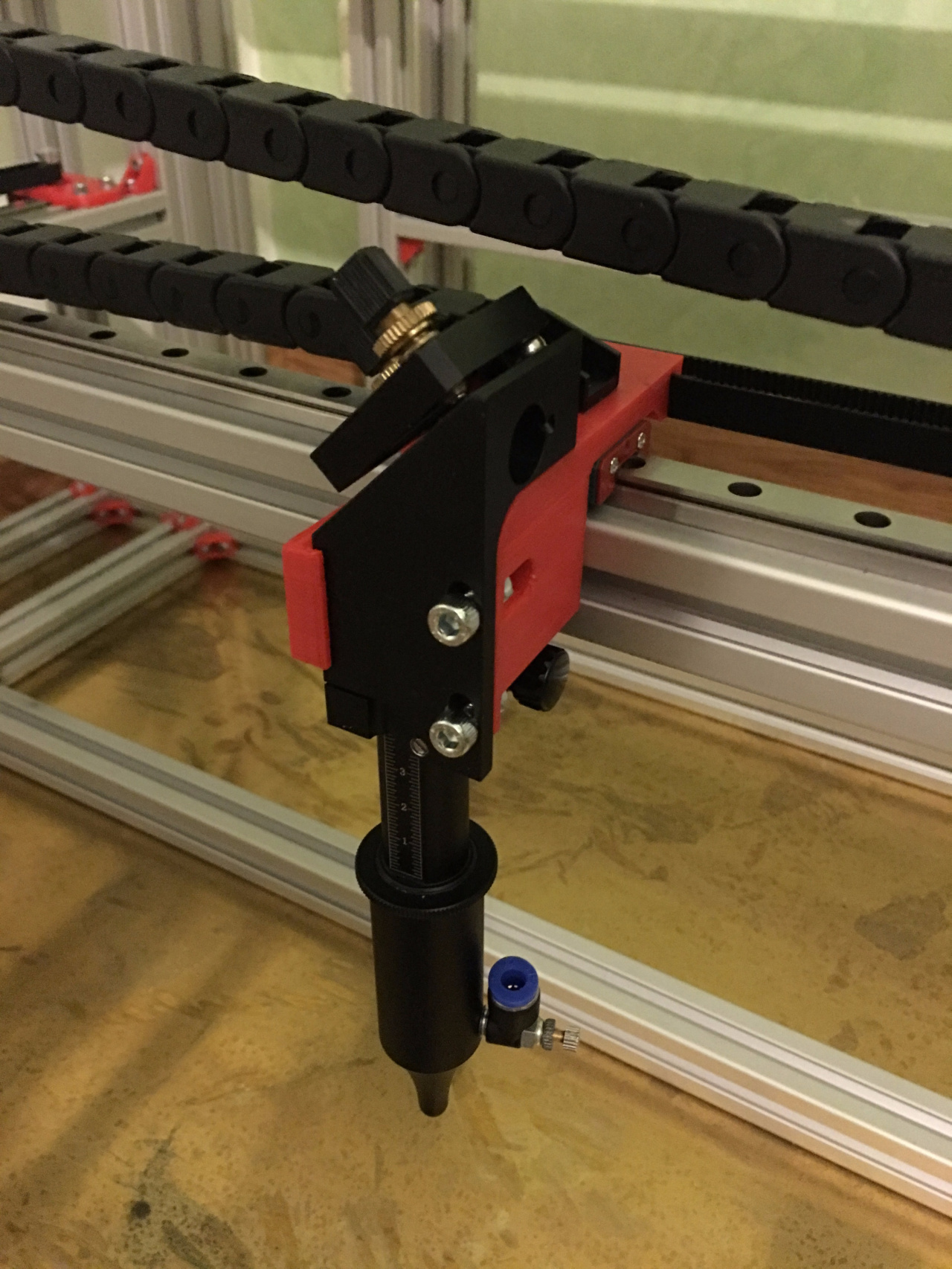
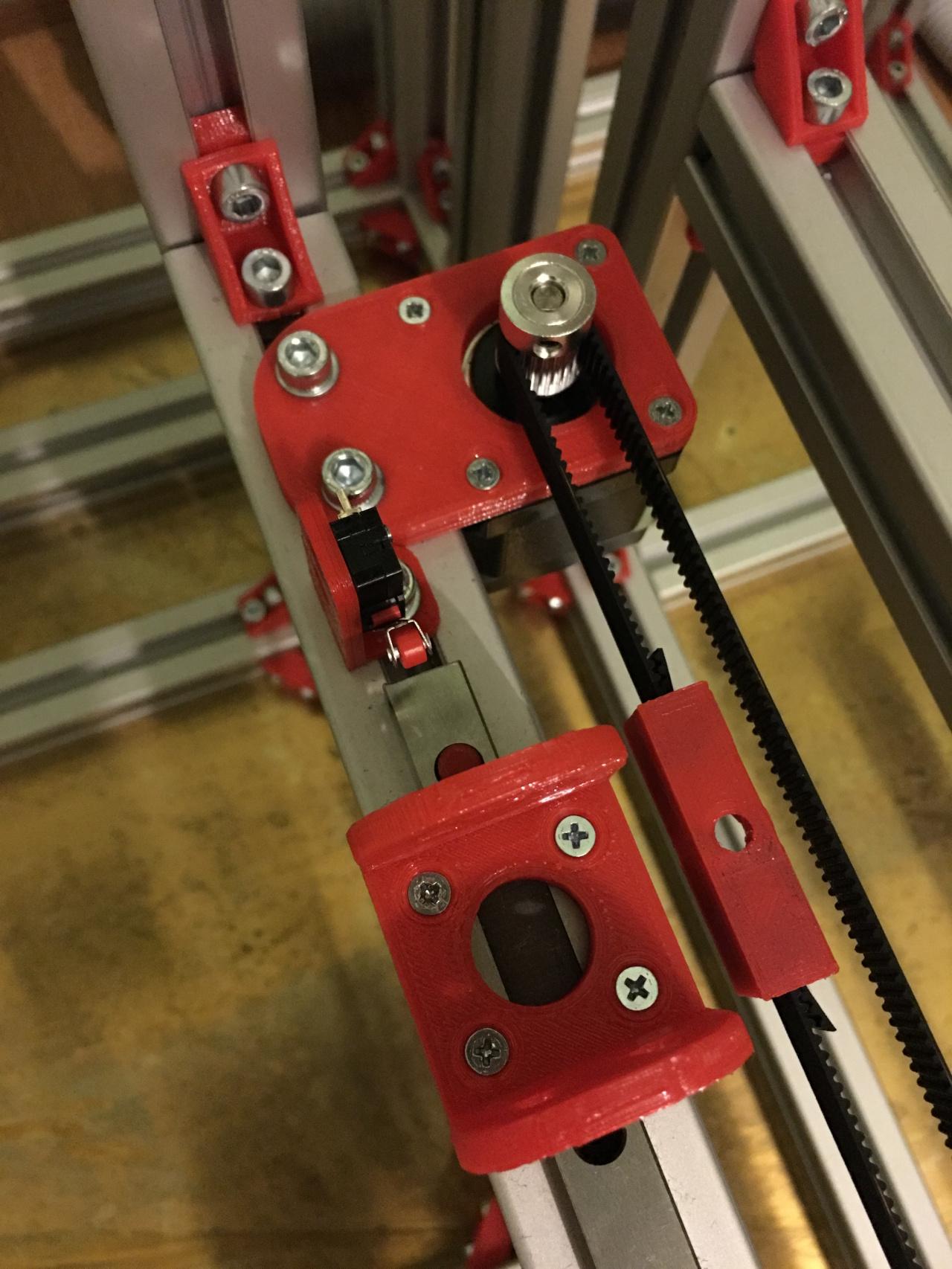


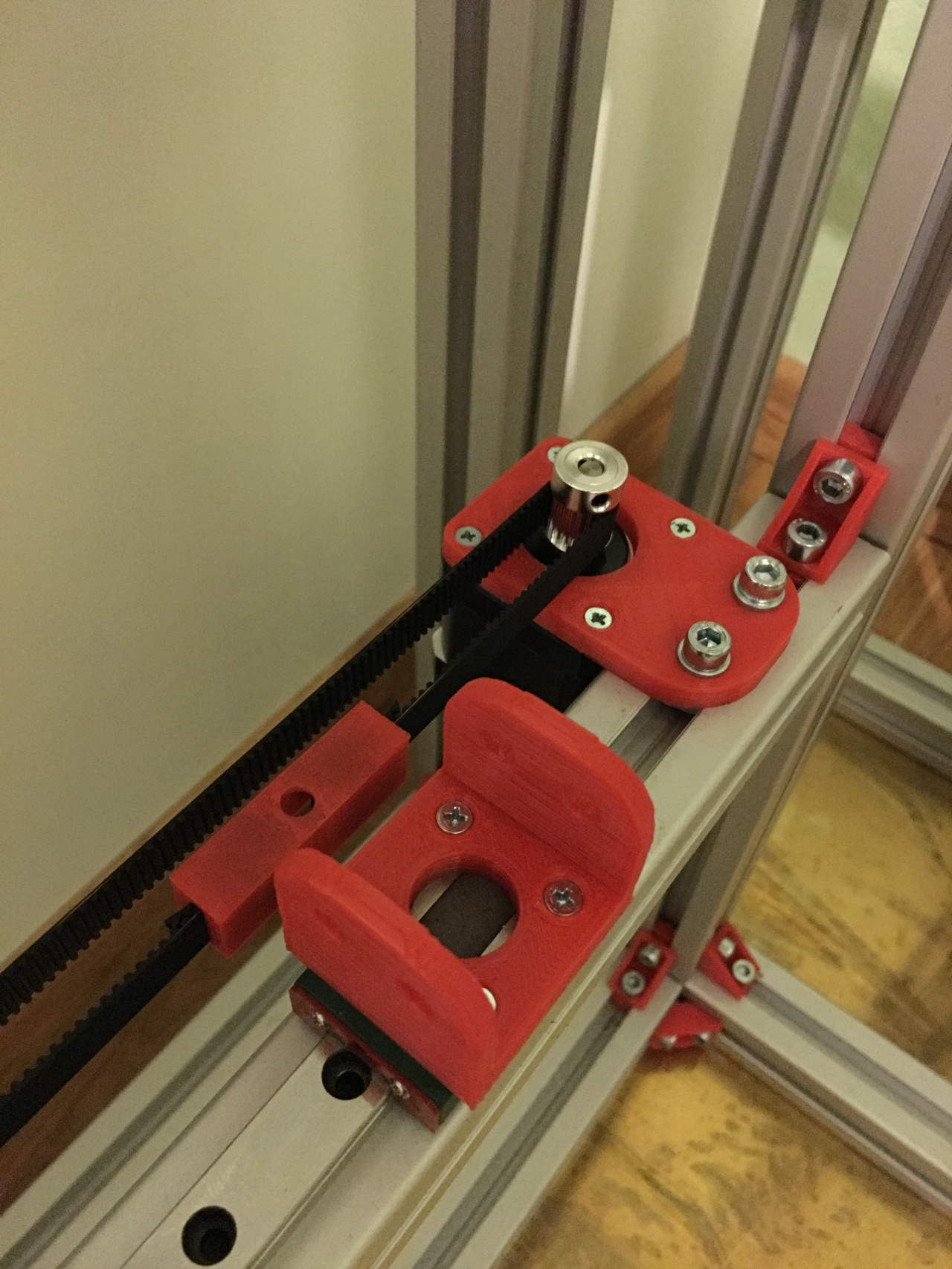

Теперь, когда у нас есть собранный каркас нашего лазерного резака, очень легко установить все рельсы, шаговые двигатели и другие детали. Лучше сделать это перед установкой пластин, потому что теперь у вас есть легкий доступ ко всему.
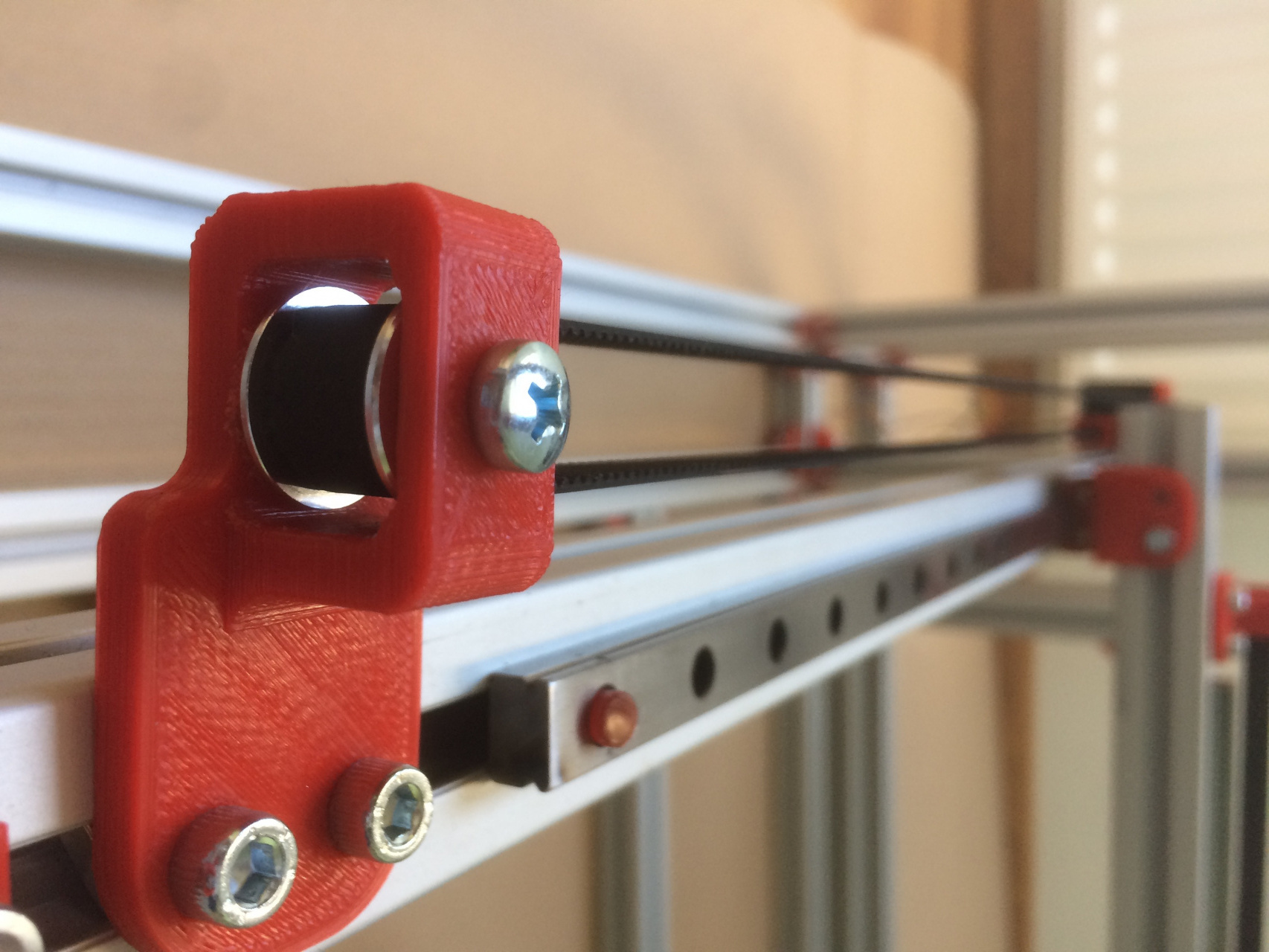
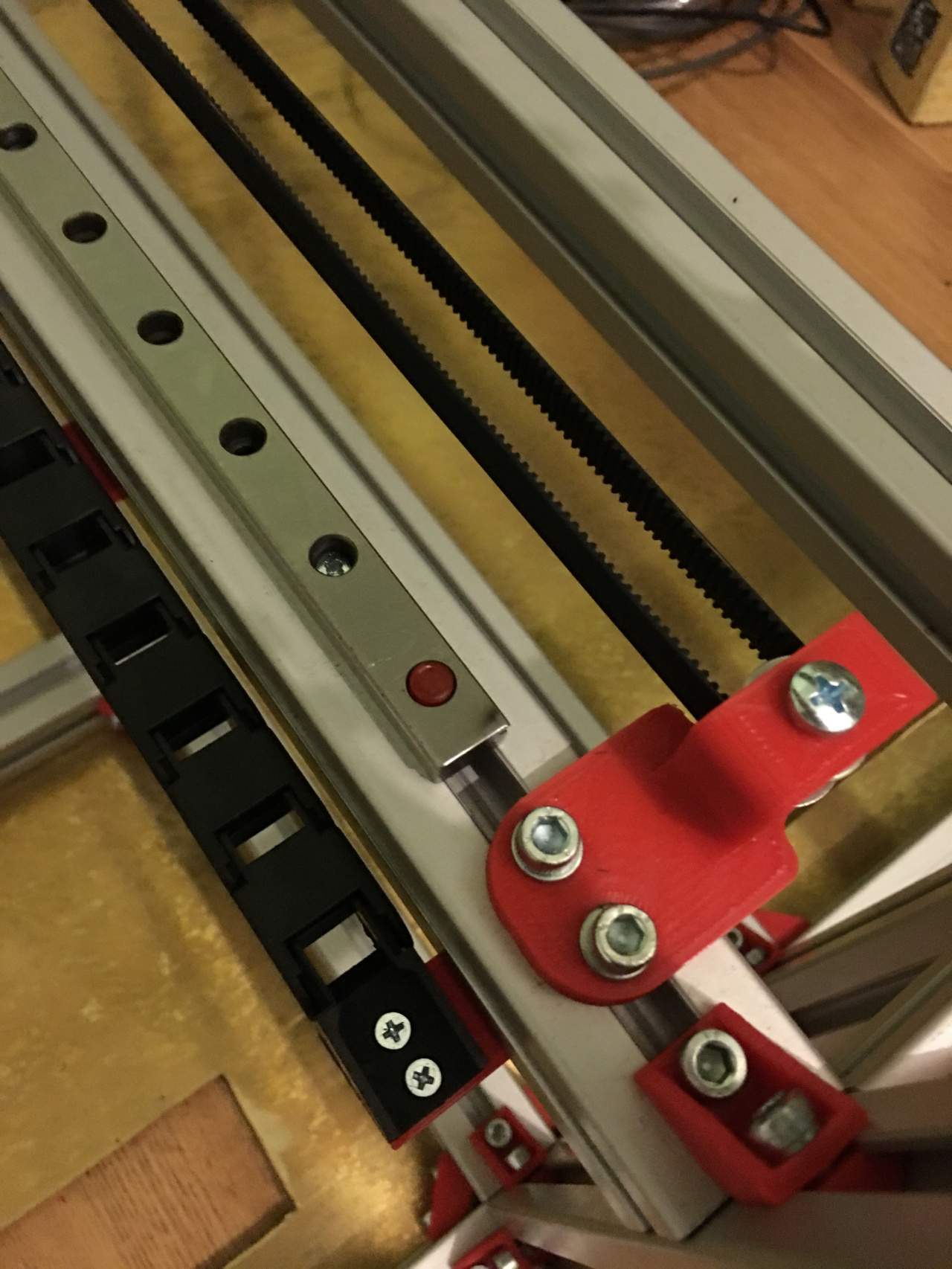
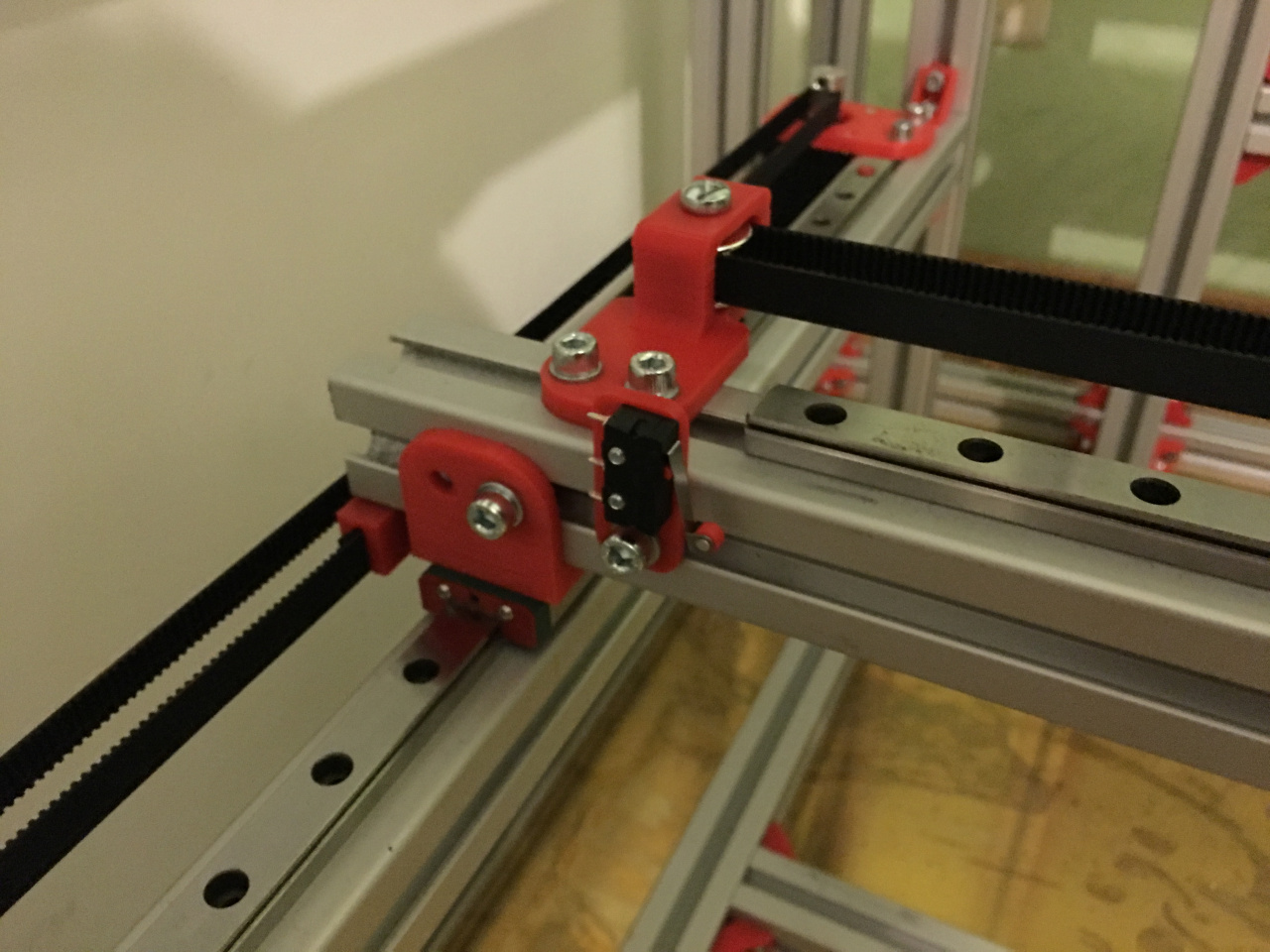
Чтобы установить эти детали, просто посмотрите на фотографии, как я это сделал, я думаю, это самый простой способ объяснить это. Единственное, что нужно изменить, это концевой выключатель оси X. Он установлен в самой дальней точке оси, и его нужно поместить в ближайшую точку. Это необходимо сделать, потому что в программном обеспечении, которое мы будем использовать (inkscape), нулевая позиция находится в левом нижнем углу. Обычные лазерные резаки используют верхний левый угол, но это на самом деле ничего не меняет на качестве ваших разрезов, поэтому нижний левый угол рабочей зоны будет использоваться в качестве исходной позиции.
Я также изменил держатель зеркала, установленный на оси Y, вам нужно установить его на том же месте, но я просто изменил его конструкцию, чтобы он был немного более устойчивым к вибрациям оси, вызванным ее перемещениями.
Кроме того, будьте очень осторожны при первом перемещении линейных подшипников по рельсам. Если вы сделаете это неправильно, вы потеряете шарики подшипника, и это будет очень неприятно.
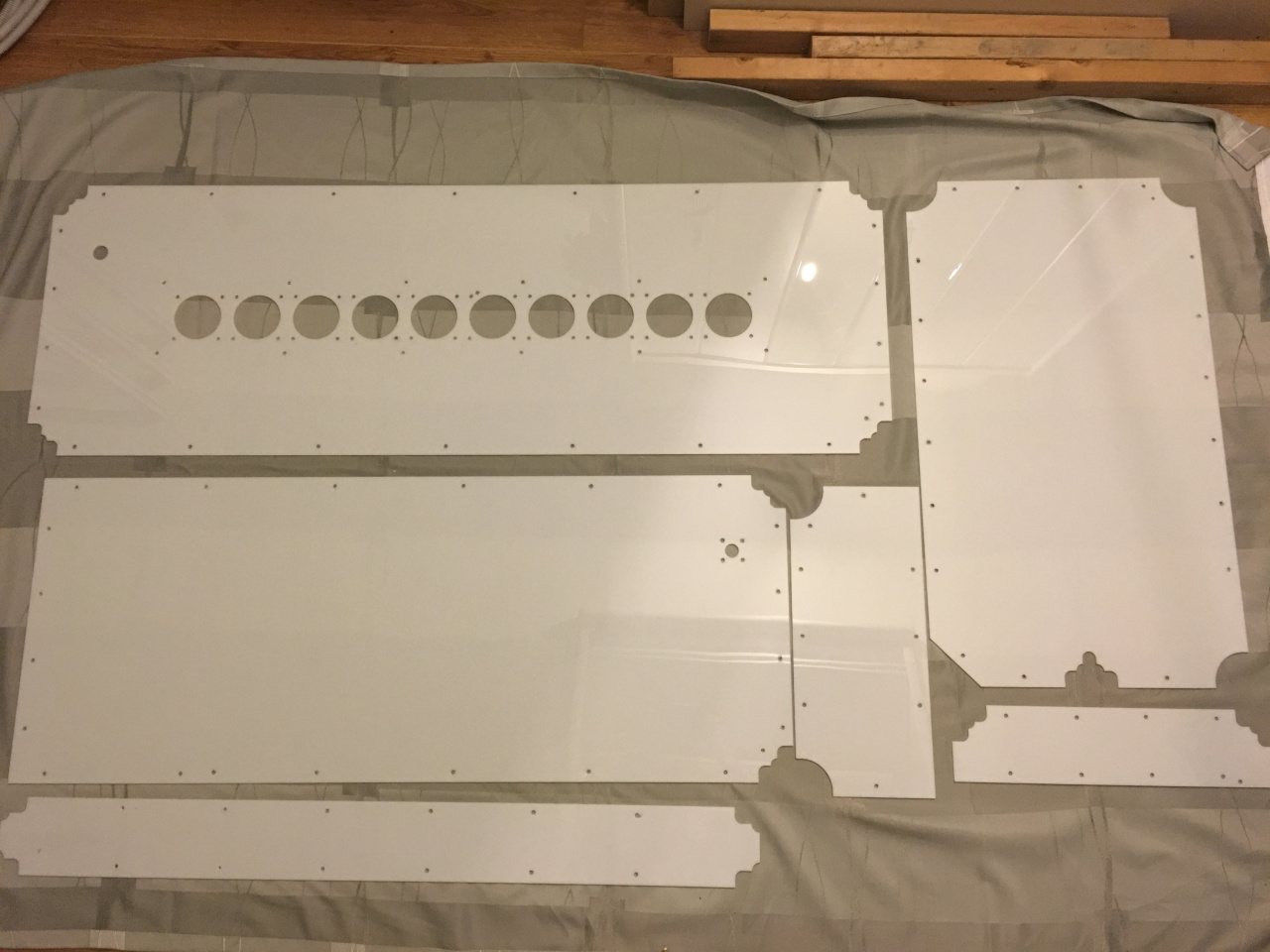
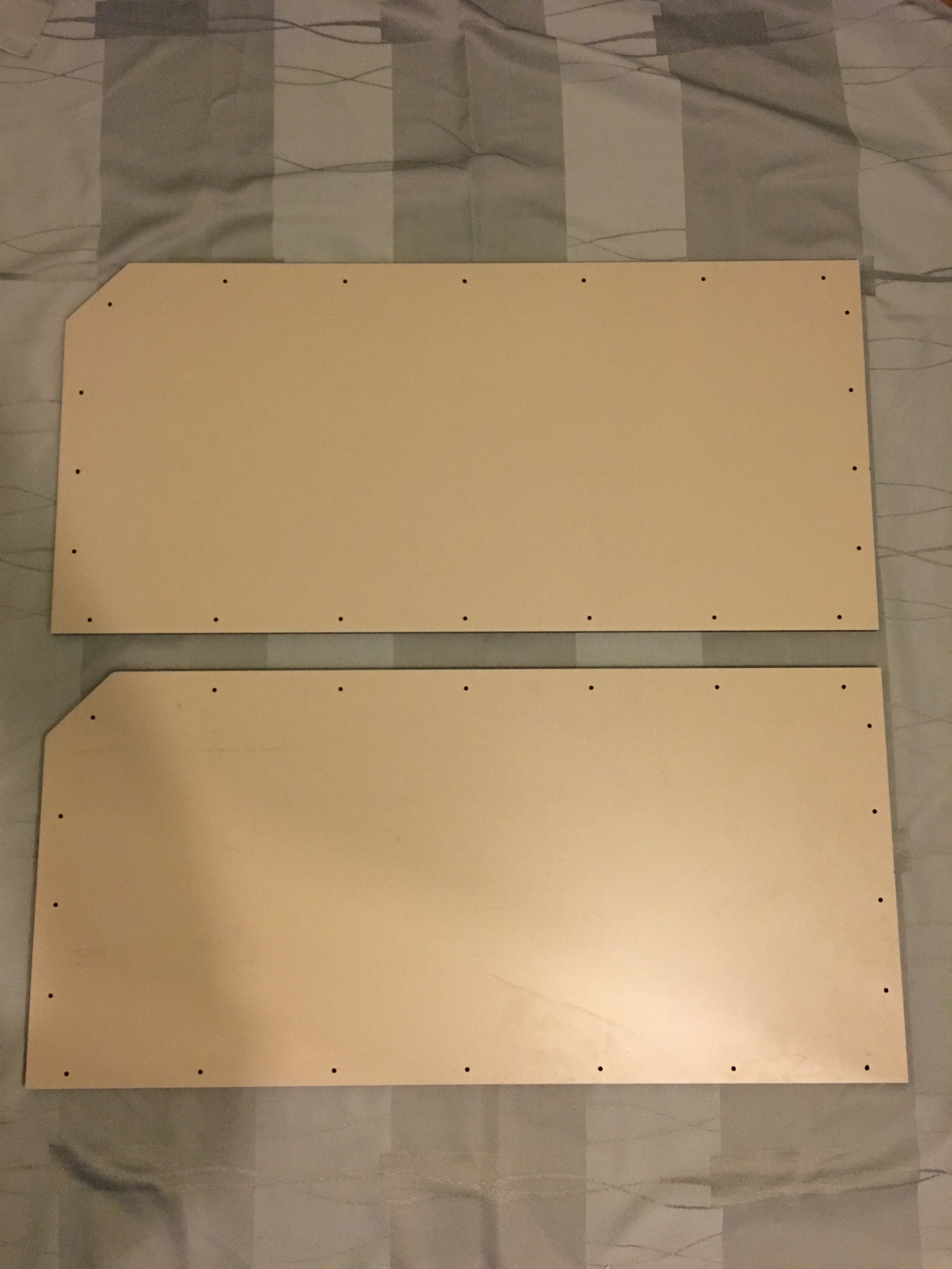
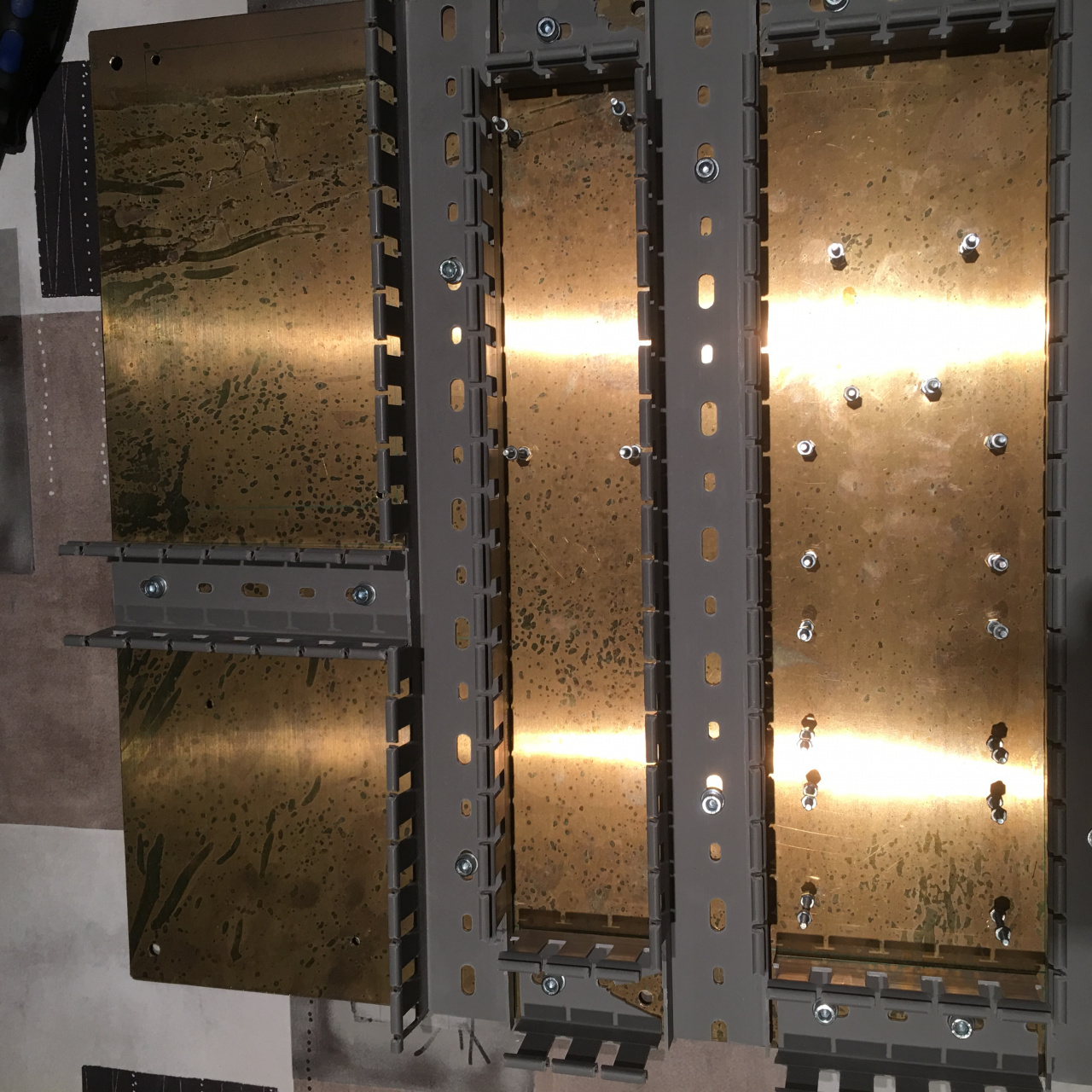
В моей школе есть фрезерный станок с ЧПУ, поэтому пластины резал один из моих учителей. Думаю, не у многих из вас есть дома фрезерный станок с ЧПУ, но не переживайте, это не проблема! Практически каждый поставщик акриловых листов предлагает резку на ЧПУ по низкой цене. Я включил файлы .dxf всех пластин, которые нужно вырезать для лазерного резака на этом этапе. Боковые панели моей машины 12 мм. Они такие толстые, потому что у нас в школе не было листов меньшего размера, и мне понравилось сочетание темного плексигласа и ламината высокого давления. Толщина боковых панелей значения не имеет. В названиях файлов я упомянул толщину, материал, цвет и количество пластин.
Темный акриловый лист толщиной 8 мм, используемый для обложки, также необходимо разрезать. Два из этих листов необходимо согнуть, чтобы они соответствовали лицевой панели, для этого я обратился в местную компанию. Файлы с размерами фаски также включаются в этот шаг. Опять же, с этим листом я использовал акрил толщиной 8 мм, потому что мог купить их по очень разумной цене. Я бы порекомендовал вам использовать акрил 6 или 4 мм для покрытия, потому что: 1. Это дешевле, если вам нужно покупать их по полной цене. 2. Крышка не будет такой тяжелой, как при использовании акрила толщиной 8 мм. 3. Сгибать пластины будет дешевле и проще.
Также нам понадобится лист МДФ 18 мм в качестве основы для рабочей зоны. Обычные любительские лазерные резаки используют сотовый стол или что-то в этом роде, но такая сетка стоит слишком дорого для размеров этого лазерного резака. Поэтому я решил использовать вместо этого лист МДФ. Обычно это не должно вызывать проблем, но я бы все же рекомендовал для этого использования огнестойкий МДФ (да, он существует).

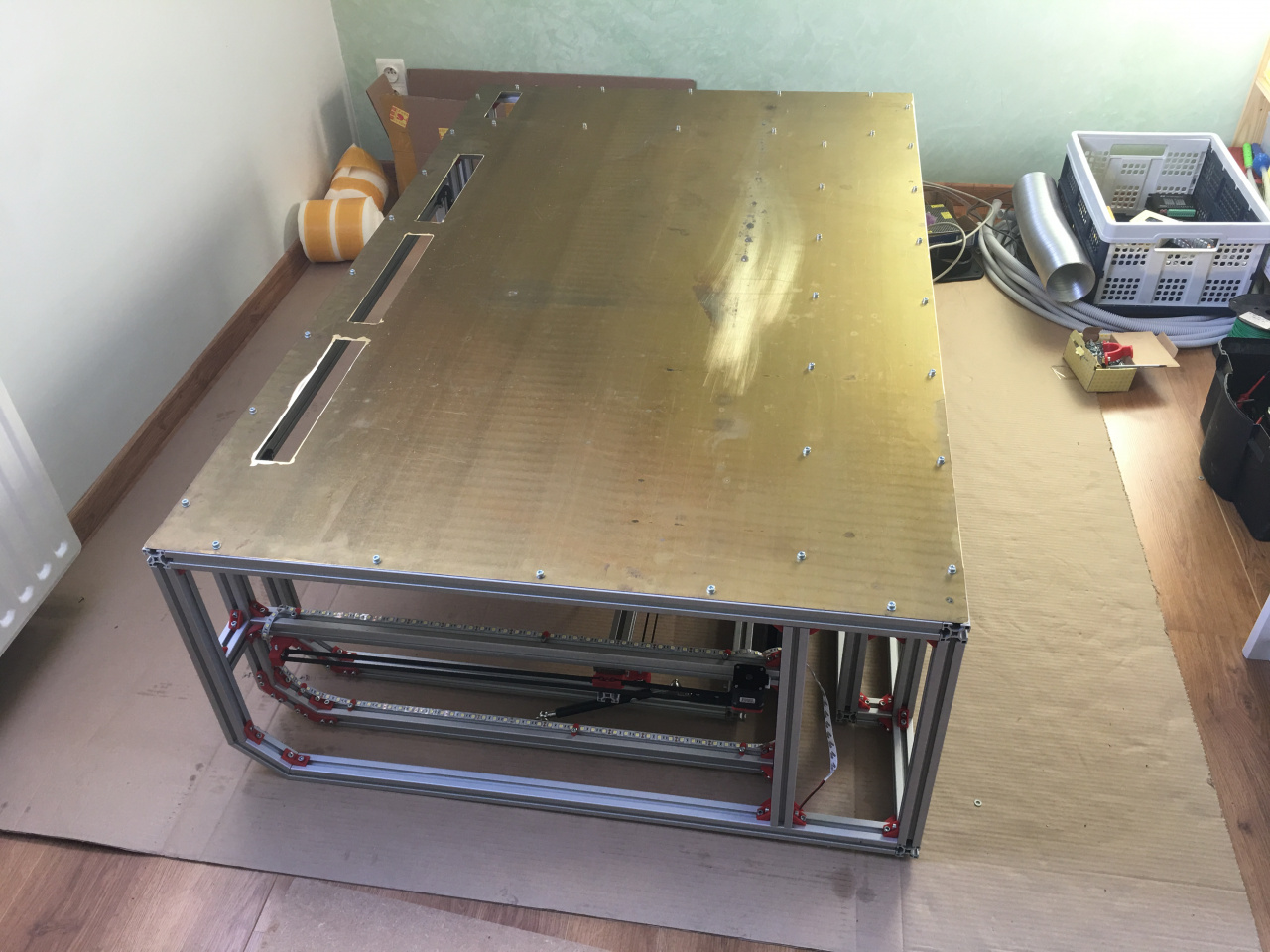
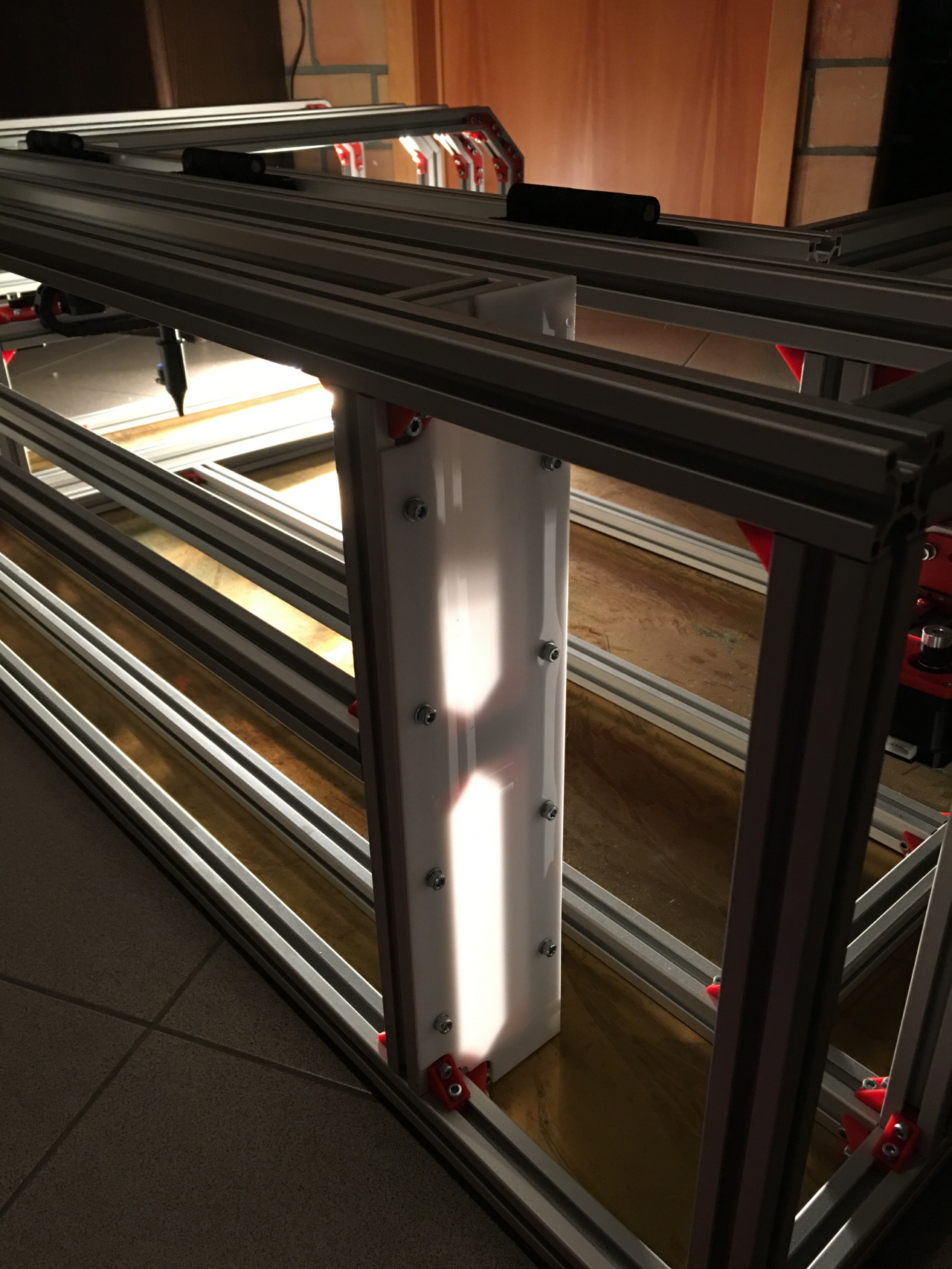
Теперь, когда мы смонтировали ось, шаговые двигатели и другие детали (напечатанные на 3D-принтере), пришло время установить пластины. Я установил почти все пластины, за исключением задней и боковой пластины на стороне электроники. Есть еще некоторые детали, такие как электроника, лазер, резервуар для воды, которые должны быть там установлены, поэтому эти комнаты нужно оставить открытыми.
Кроме того, между профилями и каждой пластиной вентиляционной зоны я приклеил "воздушную полосу", вы можете видеть ее на фотографиях. Эта прокладка предотвращает выход паров из вентиляционного помещения между профилями и плитами. Это очень важно!
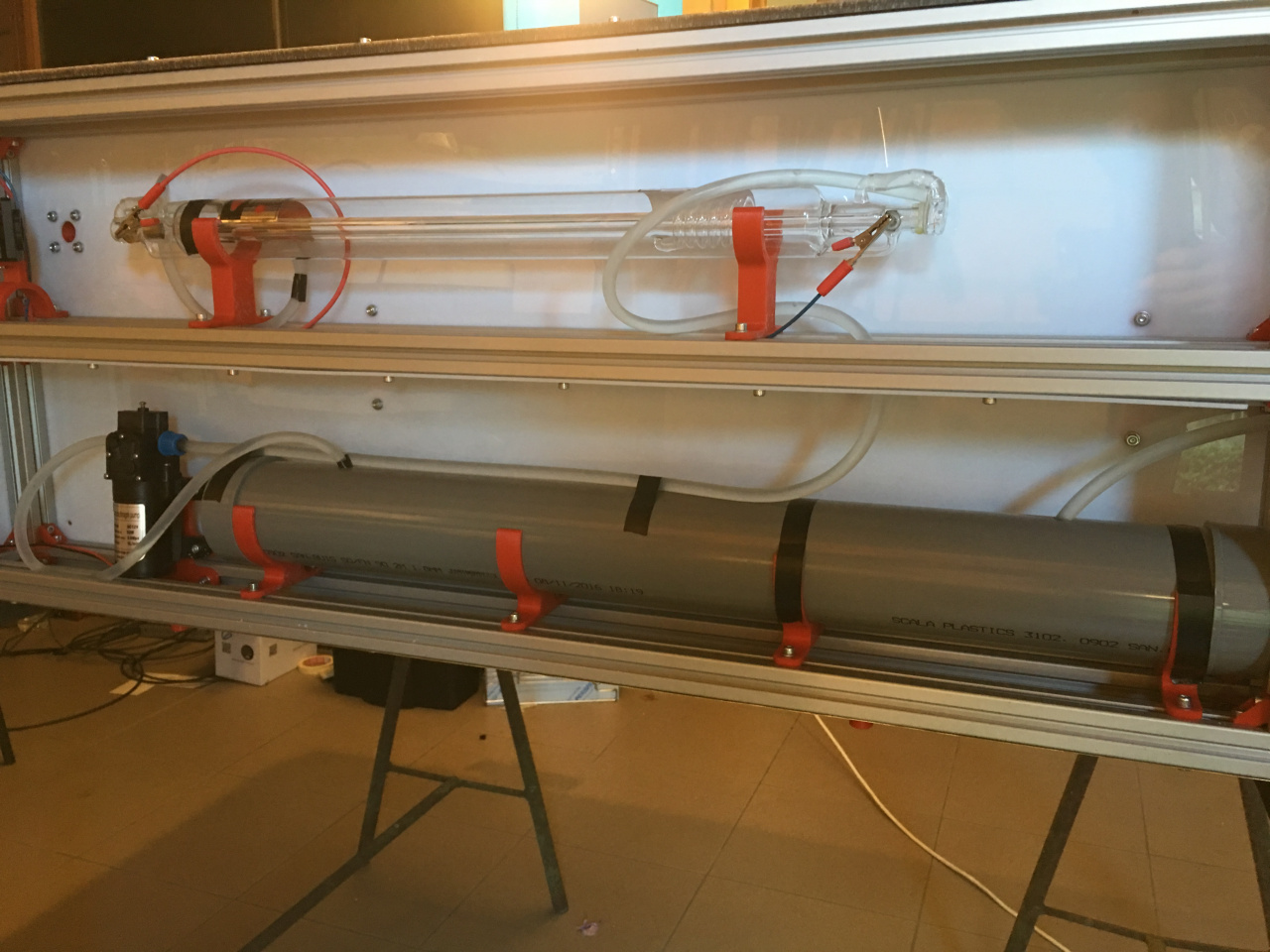

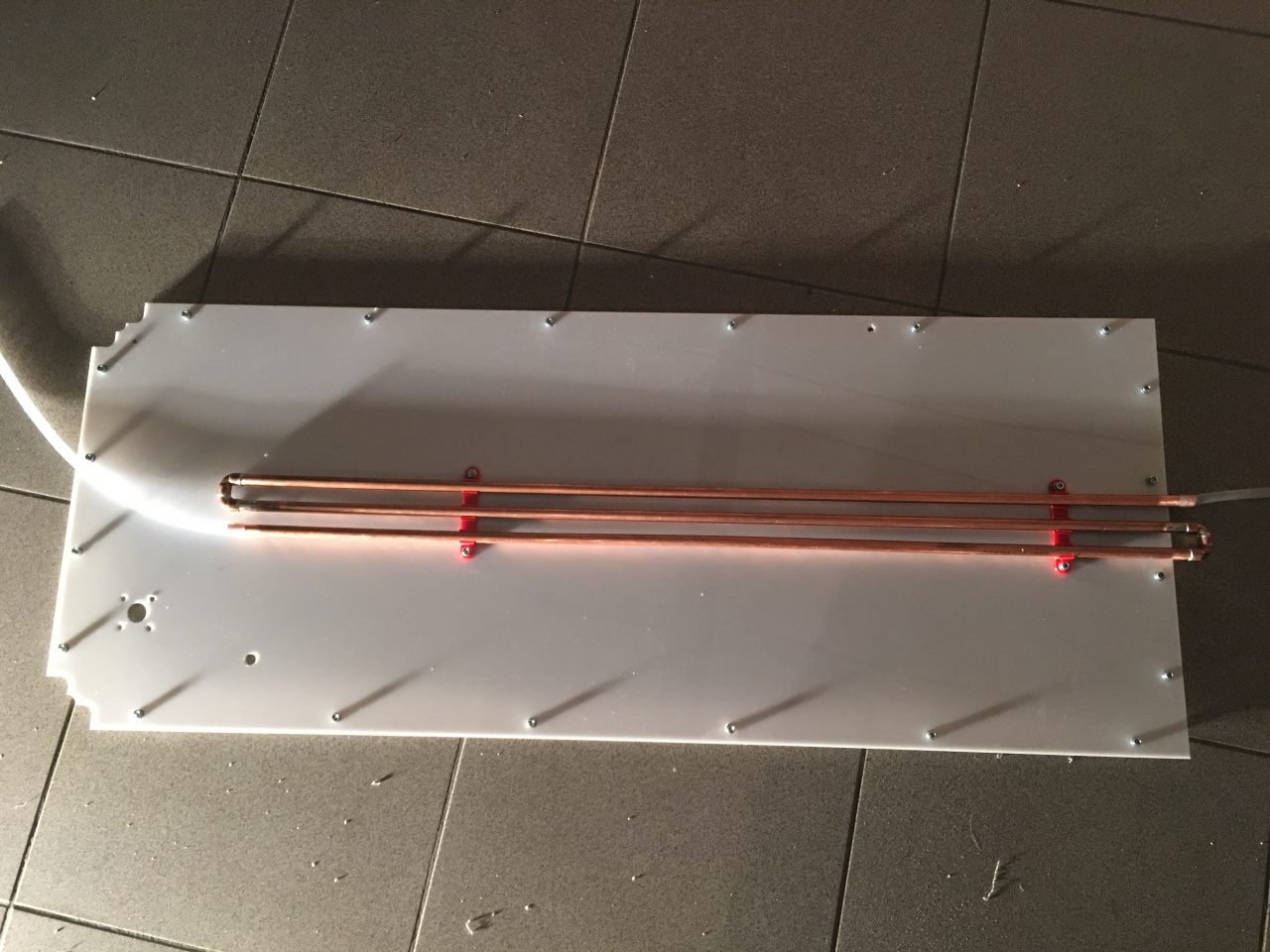
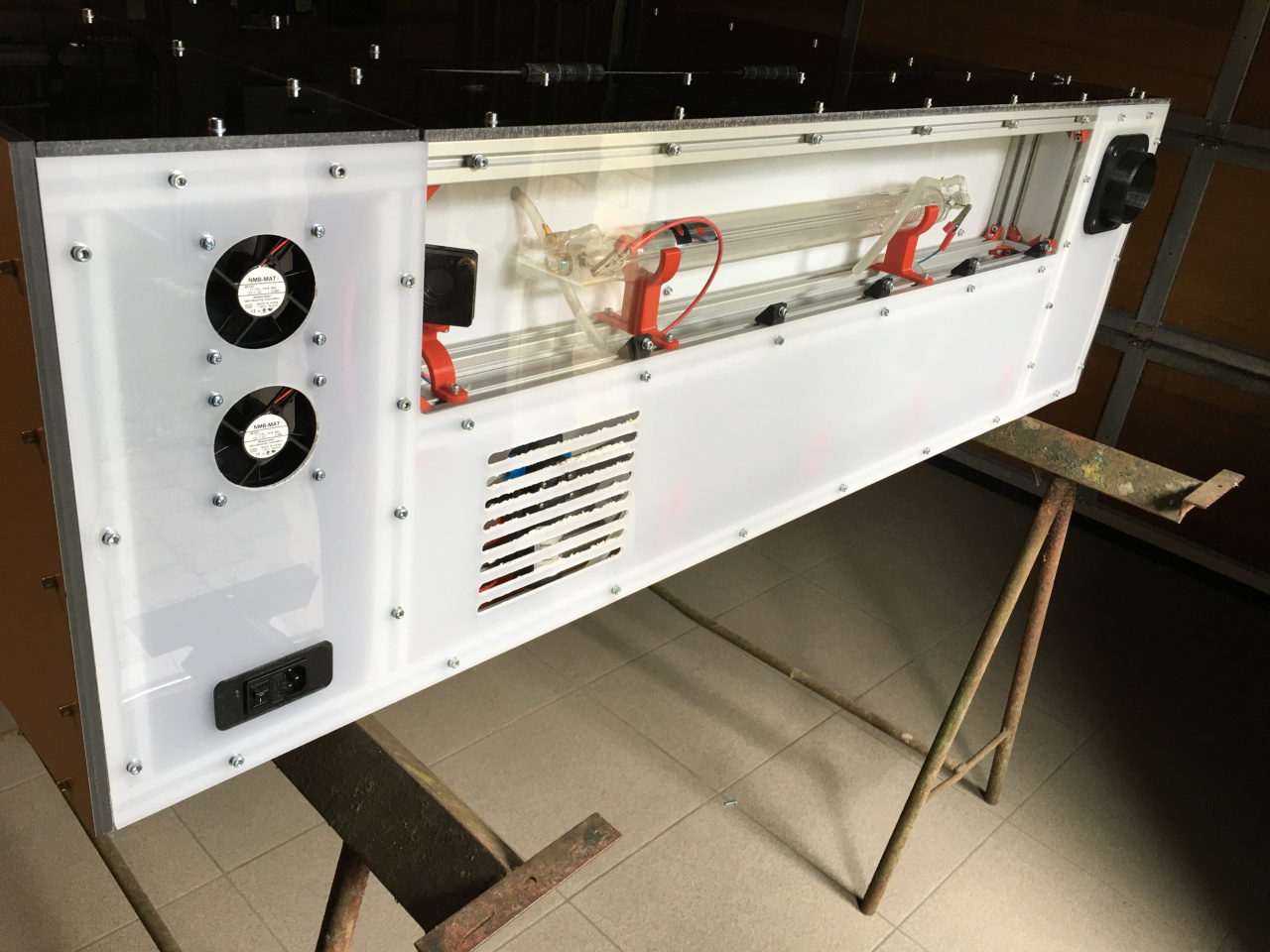
Поскольку будет использоваться CO2-лазер мощностью 40 Вт, сам лазер необходимо охладить. Это будет сделано путем водяного охлаждения. Емкость для воды я сделал резервуар для воды из старой 90 - миллиметровой ПВХ-трубы (длиной 800 мм). Вода будет перекачиваться из резервуара в лазер, в медные трубы для охлаждения воды, а затем обратно в резервуар.
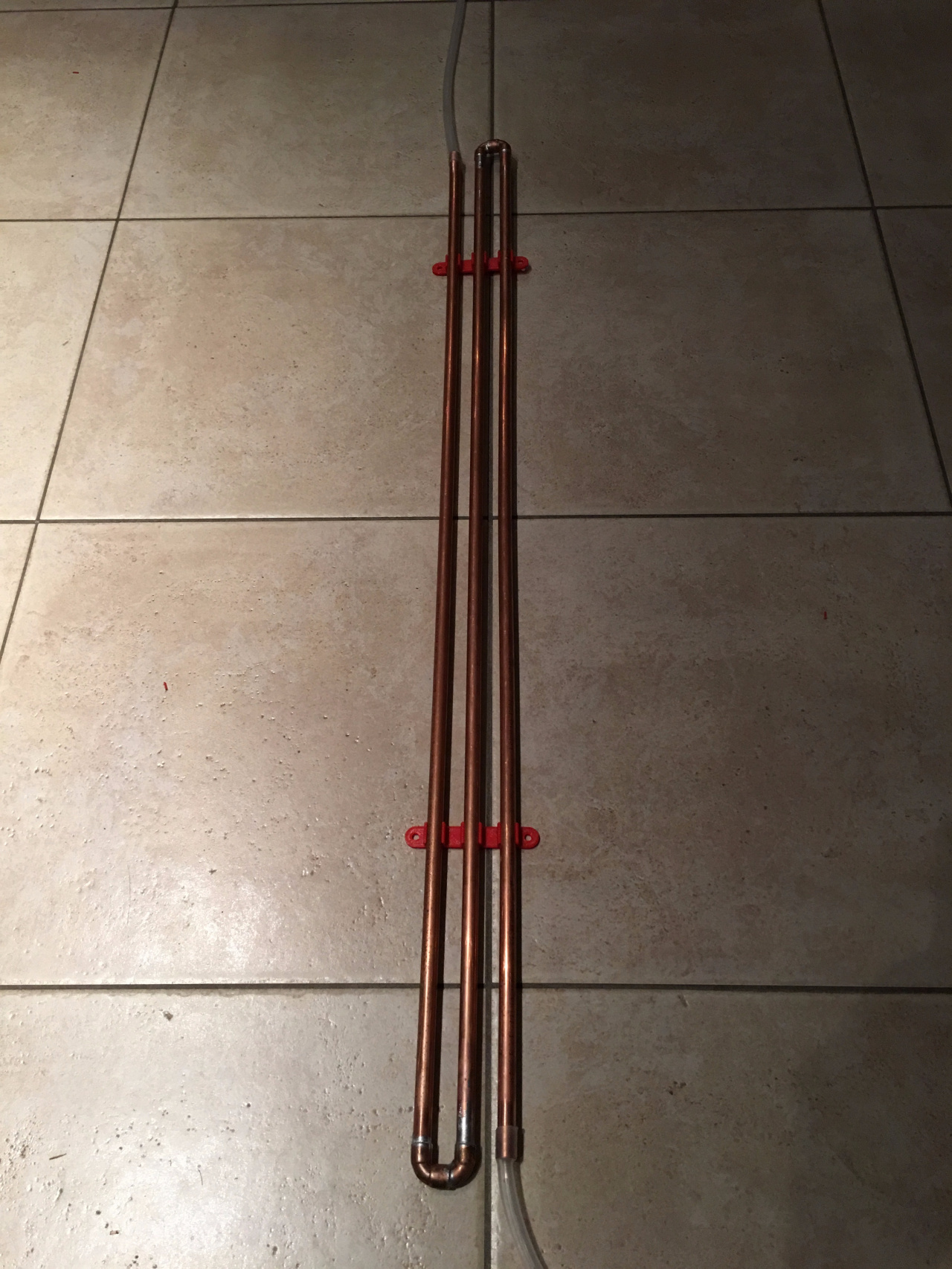
Что касается медных труб, я купил три 12-миллиметровые медные трубы по 1 м вместе с двумя трубами коленами и просто спаял их, как вы можете видеть на картинке. Медные трубы будут установлены внутри вентиляционной комнаты, поэтому десять компьютерных вентиляторов, установленных в ряд на другой пластине, будут постоянно обдувать трубы воздухом, чтобы они могли охлаждать воду. Таким образом, вентиляторы не только удаляют дым из рабочей зоны, но и охлаждают охлаждающую воду.
Как я только что упомянул, десять компьютерных вентиляторов будут установлены в задней части рабочей зоны для удаления дыма. На большинстве изображений в этом руководстве они установлены на задней части пластины с фильтром перед ними, так что вентиляторы фактически находятся внутри помещения для вентиляции. Мне пришлось это изменить, потому что скорость потока вентиляторов сильно уменьшилась. Это было связано с тем, что за вентиляторами и фильтром не хватало места. Теперь вентиляторы установлены перед пластиной, и они намного эффективнее.
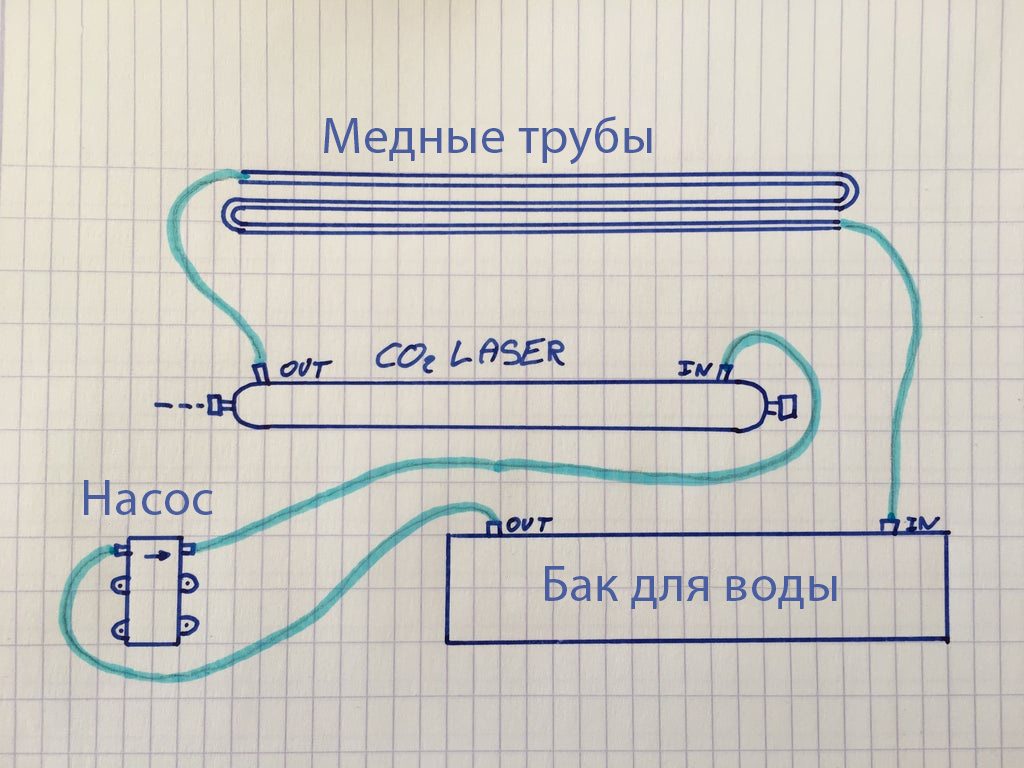
Я нарисовал эскиз соединения трубок охлаждающей воды с элементами. Вы можете увидеть направление потока воды на насосе.
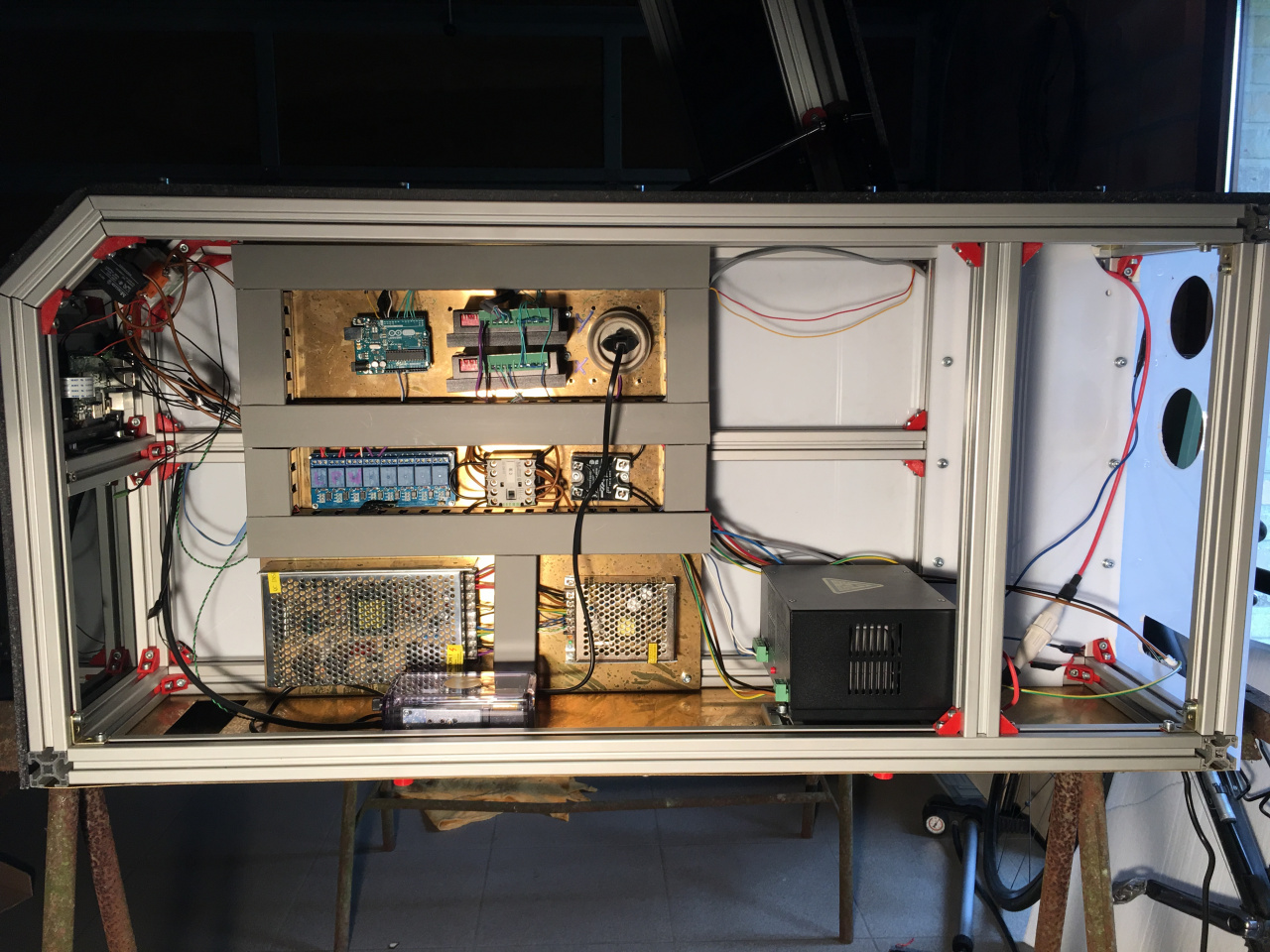
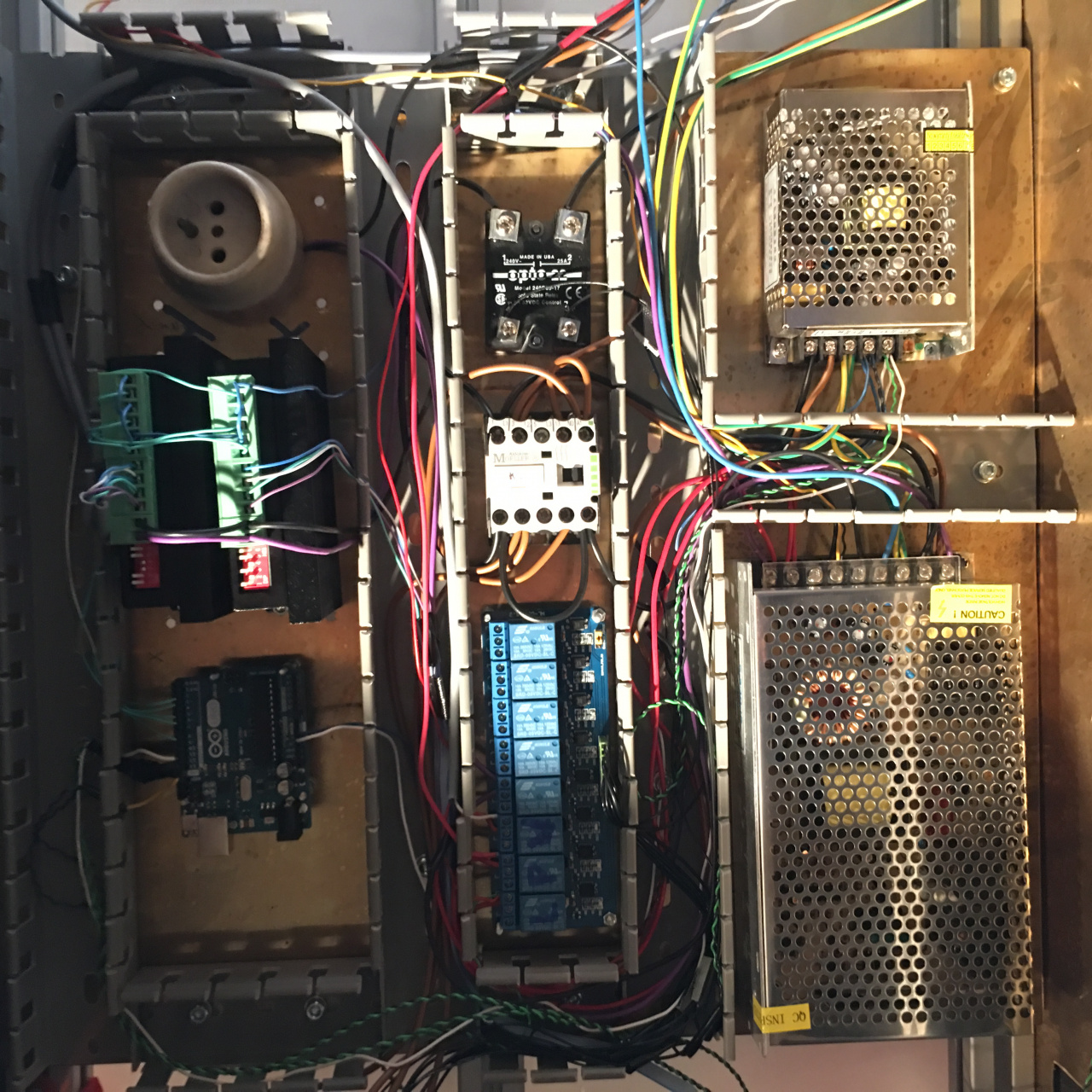
На фотографиях электроника может показаться сложной, но на самом деле все очень просто. Есть два источника питания: один 12 В для вентиляторов, насоса и двигателей и один источник 5 В для питания микроконтроллеров. Arduino просто подключается к драйверам шагового двигателя и драйверу CO2-лазера. Raspberry pi просто подключен к некоторым кнопкам. Одна кнопка определяет, закрыта ли крышка, а другая - аварийная остановка. Raspberry Pi также управляет релейным модулем. Другие части, которые вы можете увидеть, - это реле для цепи аварийной остановки и твердотельное реле для отключения питания лазера, когда крышка открыта.
Вся используемая электроника упоминается в спецификации, за исключением двух резисторов (825 Ом) и двух конденсаторов (1000 мкФ). Я установил блоки питания, Arduino, драйверы шаговых двигателей и реле на пластину, это упрощает работу с ней. Вы можете увидеть схему электроники на картинках.
Я включил полную схему подключения для всех драйверов и микроконтроллеров, лучший способ подключить их - это распечатать схему и просто отметить, какие провода вы уже подключили, чтобы вы знали, что уже сделали. На самом деле это довольно простая работа.
Я добавил два резистора в цепь самонаведения на Arduino. У Arduino уже есть внутренние подтягивающие резисторы, но они слишком слабые и не будут работать так, как мы хотим.
Драйверы шаговых двигателей настроены на 16 микрошагов, это означает, что каждый шаг двигателей разделен на 16 отдельных шагов. Таким образом, наши шаговые двигатели должны будут делать 3200 шагов за оборот учитывая микрошагами вместо 200. Драйвер для двигателей оси Y должен быть установлен на 3,3 А, потому что два шаговых двигателя подключены параллельно. Один для оси x может быть установлен на 1,8A. Я также подключил конденсатор 25 В 1000 мкФ к линиям питания драйверов, это предотвращает помехи на линиях питания.
Лазерный резак работает с G-код. Это коды, которые сообщают машине, какое движение она должна совершить и как ей нужно двигаться. Для этого нам понадобится интерпретатор G-code. Это устройство считывает коды с вашего компьютера (или raspberry pi с сенсорным экраном) и преобразует их в импульсы для драйверов шагового двигателя и драйвера лазера.
Я использовал arduino, работающий на GRBL, в качестве интерпретатора gcode. GRBL - бесплатное программное обеспечение с открытым исходным кодом.
Прежде всего, вам необходимо установить последнюю версию Arduino IDE на свой компьютер, если у вас ее еще нет. Это позволяет вашему компьютеру распознавать Arduino и компилировать для него GRBL.
Прежде чем мы сможем скомпилировать GRBL, вам нужно отредактировать некоторую часть кода, чтобы сделать возможным самонаведение (возврат в исходное положение). Распакуйте файл .zip, перейдите в папку grbl и откройте файл конфигурации с помощью wordpad. Используйте crtl-F, чтобы найти «наведение» и ищите, пока не найдете «#define HOMING_INIT_LOCK». Измените его на "// #define HOMING_INIT_LOCK". Это делает наведение необязательным и не требует её настройки запуском задания. Еще четыре вещи, которые необходимо изменить:
"#define HOMING_CYCLE_0 (1 ... Z_AXIS)", измените эту строку. (Добавьте "//" в начале строки)
"#define HOMING_CYCLE_1 ((1 ... X_AXIS) | (1 ... Y_AXIS))", измените эту строку.
"// #define HOMING_CYCLE_0 (1 ... X_AXIS)", измените эту строку. (удалите "//")
"// #define HOMING_CYCLE_1 (1 ... Y_AXIS)", измените эту строку.
"..." нужно заменить на //.
Эти изменения говорят GRBL, что мы не используем ось Z, это необходимо, потому что, когда лазерный резак хочет вернуться в исходное положение, он сначала вернет ось Z в исходное положение. Не забудьте нажать «Сохранить» при закрытии Wordpad.
Теперь, когда grbl можно скомпилировать для Arduino, я обращусь к странице компиляции GRBL .
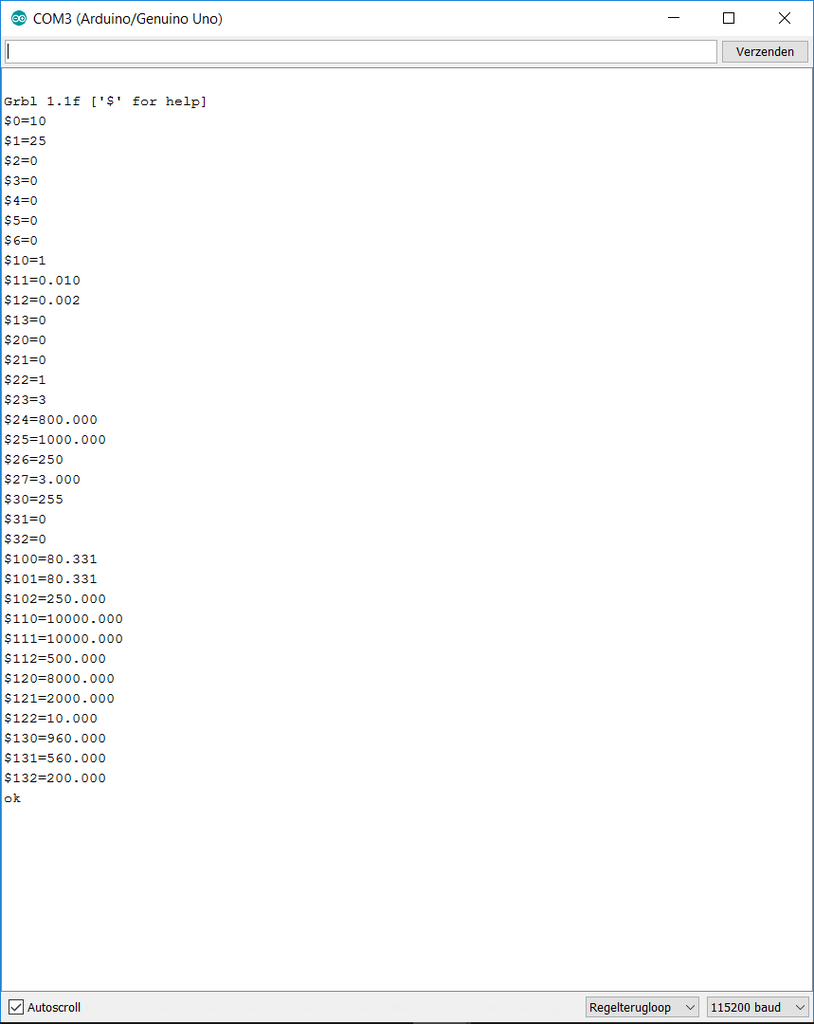
Когда это будет сделано, снова откройте IDE arduino и откройте последовательный монитор (правый верхний угол). Сначала установите скорость 115200 бод и введите «$$». Теперь нужно изменить некоторые значения. Вы можете увидеть значения, которые необходимо изменить, на изображении, которое я загрузил на этом этапе. Если вам нужна дополнительная информация об этих цифрах.

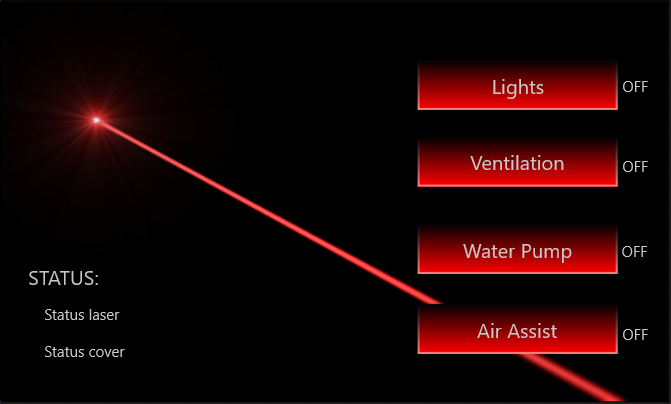
На данный момент я написал только простой фрагмент кода для raspberry pi с четырьмя кнопками для управления светом и другими функциями. Он также выполняет некоторые проверки безопасности перед включением лазера. Как я уже сказал, цель состоит в том, чтобы создать автономный лазерный резак, а это означает, что Raspberry будет считывать коды с USB-накопителя и отправлять их один за другим в Arduino. Тогда вам не понадобится компьютер. К сожалению, у меня сейчас нет на это времени, поэтому я просто написал простой код.
Я загрузил образ диска своей SD-карты, поэтому единственное, что вам нужно сделать, это скачать образ диска и использовать win32diskimager для записи файла на SD-карту объемом 4 ГБ.
Для тех, кто хочет отредактировать код или продолжить разработку кода, чтобы придать ему больше функциональности, я также загрузил сам код. Он написан на C# с помощью Visual Studio 2017.
ОБНОВЛЕНИЕ: я удалил raspberry pi и сенсорный экран со своего лазерного резака и просто заменил его четырьмя переключателями (для включения вентиляции, охлаждения, освещения и поддержки воздуха). Я все еще планирую обновить raspberry, чтобы сделать его автономным устройством, но сейчас у меня нет на это времени.
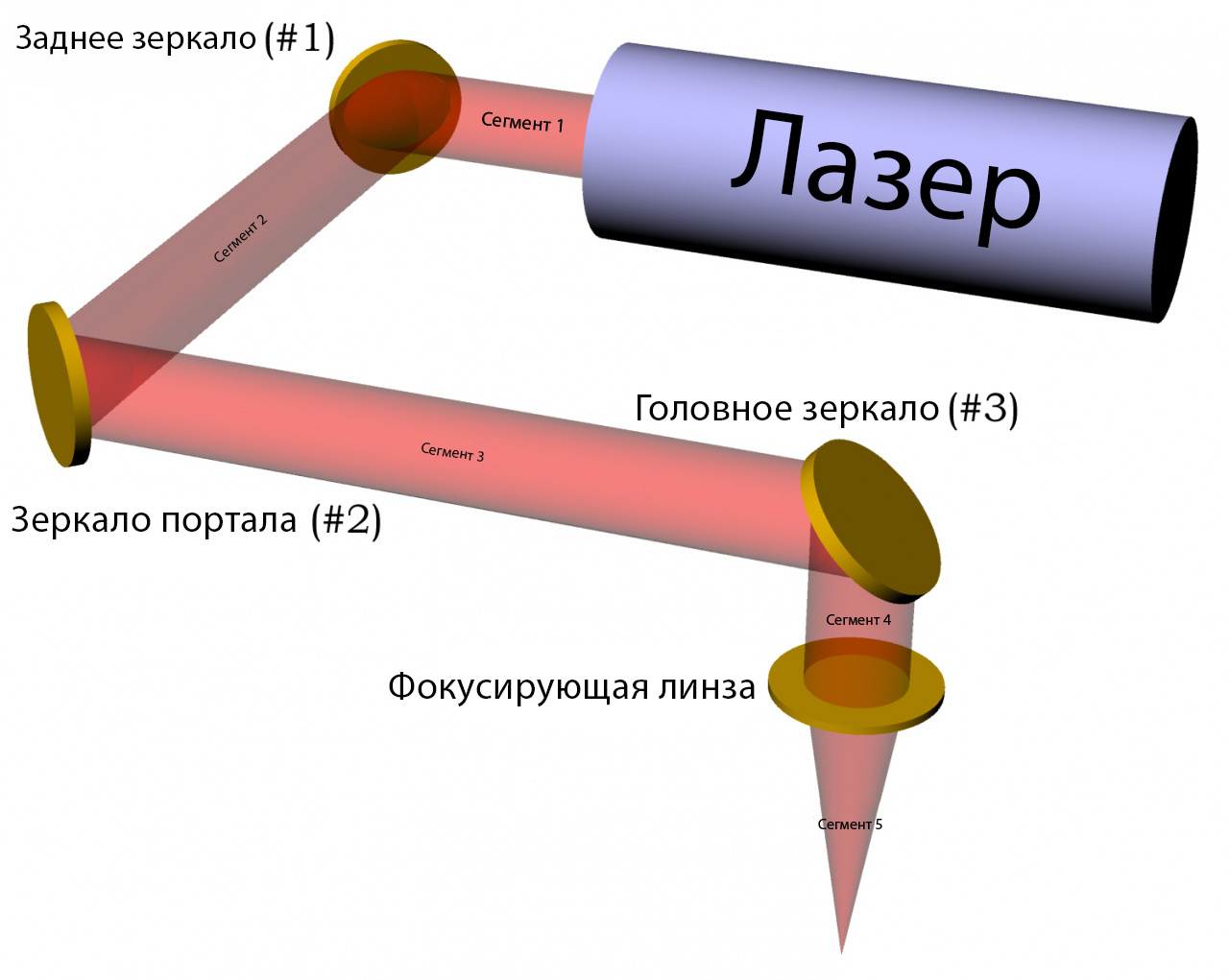
Теперь электроника и программное обеспечение сделаны, мы почти готовы использовать лазерный резак. Осталось только откалибровать зеркала для направления лазерного луча в нужное место. Это важно и должно быть сделано правильно, потому что, как вы знаете, лазерный луч направляется в нужном направлении с помощью зеркал. Если одно из зеркал отражается в неправильном направлении, луч не попадет в нужное место и может сжечь что-то, что не нужно сжигать.
Для калибровки зеркал возьмите кусок дерева или картона и приклейте его двусторонним скотчем на второе зеркало (то, которое движется вместе с осью Y). Переместите ось Y к ближайшей точке первого зеркала (ту, что находится рядом с самим лазером). Быстро нажмите кнопку тестирования на драйвере лазера. Теперь лазер пометил кусок дерева точкой. Теперь переместите ось Y в самую дальнюю точку оси и снова нажмите кнопку тестирования. Лазер отметит еще одну точку на деревянной детали. Цель состоит в том, чтобы две точки находились на одном и том же месте. Поэтому вам нужно повторить это несколько раз с новым куском дерева. Между сессиями вам нужно настроить первое зеркало, поворачивая эти болты. Постарайтесь, чтобы это место находилось в центре зеркал, отрегулируйте их положение перед выравниванием.
Когда первое зеркало откалибровано, вы можете сделать то же самое для второго зеркала.
Для последнего зеркала, которое направляет луч вниз в линзу, я просто отрегулировал зеркало так, чтобы луч стал идеально вертикальным.
Вы убедитесь, что это очень просто и займет всего 15 минут. После нескольких часов работы вашего лазерного резака вам придется повторить этот шаг.


Когда лазер правильно откалиброван и все протестировано, последние пластины можно устанавливать на конструкцию. Теперь выхлопная труба, охлаждающие вентиляторы для электроники и вилка питания также могут быть установлены на задней панели.

Чтобы использовать этот лазерный резак, необходимо сгенерировать G-коды и отправить их в Arduino.
Есть два способа использования лазерного резака: векторный режим и растровый режим. В векторном режиме контур объекта будет вырезан или выгравирован. В растровом режиме гравируется не только контур, но и сам объект.
Чтобы создать объекты, которые нужно вырезать, я использую inkscape V0.91 . С двумя расширениями для генерации G-кодов. Один для векторного режима . И еще один для растрового режима . Вы также можете импортировать такие файлы, как .svg, .dxf, .jpeg .
Для отправки G-кодов в Arduino используется LaserGRBL .
Это все файлы и программы, необходимые для того, чтобы лазерный резак выполнял свою работу. Помните, что сам лазер будет работать только при включенном насосе и закрытой крышке.




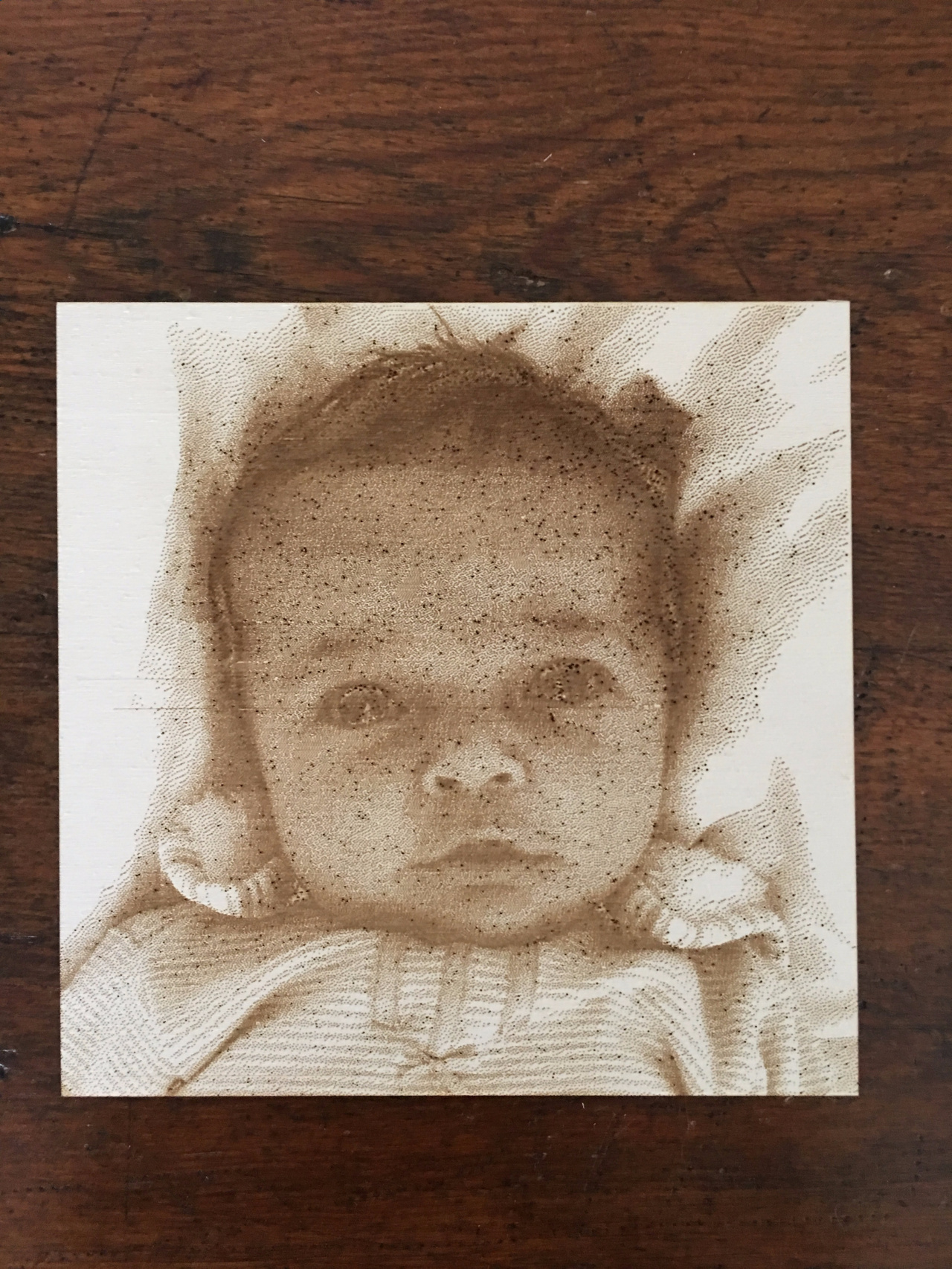


Теперь у вас есть собственный потрясающий лазерный резак на CO2. Если у вас есть такая машина, то вы действительно можете сделать все, что захотите! Я уже сделал тонны брелков, картинок, коробок, поздравительных открыток и даже деревянную уточку!
Это был действительно забавный проект, я работал днем и ночью над проектированием, сборкой, программированием и тестированием этого лазерного резака, и мне очень понравилась каждая секунда!
Я очень надеюсь, что вам понравится этот проект так же, как и мне!
Если вам понравился данная инструкция, то поделитесь её со своими друзьями, оставляйте комментарии и ставьте лайк!
 3
3
Лазерный гравировальный станок с ЧПУ LM 2030 PRO OPEN 180W
Рабочий стол – 2000х3000 мм; Мощность трубки – 180 Вт; Ресурс – 10 000 моточасов; Потребляемая мощность – 6 кВт; Вес – 1300 кг
1 456 547 ₽
 1
1
Лазерно-гравировальный станок с ЧПУ LM 1610 PRO 130W
Рабочий стол 1600х1000 мм. Мощность трубки 130 Вт. Ресурс 10 000 моточасов. Потребляемая мощность 2,5 кВт. Вес 550 кг
560 210 ₽
Коллекция головоломок сделанных с помощью лазерно-гравировального станка [макеты для резки прилагаются] Владимир Спасибо за статью! А мы вот сделали stickercut для...
Черные и цветные металлы: различия и области применения Артём монстр трак
18 различных типов металла — факты и применение Ра Просто восхитительно, спасибо)
Лучшие контроллеры ЧПУ для фрезерных, токарных и плазменных станков [Часть 2] Виктор Если вас интересует контроллер для гравировки орнамента ....
Строим фрезерный станок с ЧПУ своими руками [Схемы + Чертежи] Николай Семеновых, Санкт-Петербу Меня интересуют вопросы самодельного 3D-принтера для...
Почему латунь, бронза и медь зеленеют? Станислав Вы ошибаетесь, называя этот процесс окислением. Оксид...










 Фрезерование на станках с ЧПУ – Подробно про процесс, станки и операции
Фрезерование на станках с ЧПУ – Подробно про процесс, станки и операции 10 лучших систем ЧПУ в мире
10 лучших систем ЧПУ в мире Черные и цветные металлы: различия и области применения
Черные и цветные металлы: различия и области применения Почему латунь, бронза и медь зеленеют?
Почему латунь, бронза и медь зеленеют? Область применения и интересные факты о меди
Область применения и интересные факты о меди![12 методов изготовления изделий из пластика и примеры их использования [Часть 1]](https://www.stankoff.ru/files/blog/5EajrhQ1N1mq4SMdzLrhvVL5YMvbtkJ4cte2ZkwP-sm.jpg) 12 методов изготовления изделий из пластика и примеры их использования [Часть 1]
12 методов изготовления изделий из пластика и примеры их использования [Часть 1] Лазерная очистка металла: принцип, характеристики и применение
Лазерная очистка металла: принцип, характеристики и применение Виды лазеров: 4 метода классификации
Виды лазеров: 4 метода классификации![Различные виды литья металлов преимущества и недостатки [Часть 1]](https://www.stankoff.ru/files/blog/qc7Dq4L4qo134CGGvQjiCfGdKsJDrGmMj9wYlh2m-sm.webp) Различные виды литья металлов преимущества и недостатки [Часть 1]
Различные виды литья металлов преимущества и недостатки [Часть 1] Муфты — назначения, типы и факторы выбора
Муфты — назначения, типы и факторы выбора![Что такое отжиг? [7 видов процесса отжига]](https://www.stankoff.ru/files/blog/ItTTmsvBPNripAYsLPzmFCiuSBuoWIRR5FN1TAzS-sm.jpg) Что такое отжиг? [7 видов процесса отжига]
Что такое отжиг? [7 видов процесса отжига] 40 интересных фактов о металлах
40 интересных фактов о металлах 18 различных типов металла — факты и применение
18 различных типов металла — факты и применение Что такое термическая обработка металлов? Методы и преимущества
Что такое термическая обработка металлов? Методы и преимущества![Что такое нержавеющая сталь? [ Часть 2]](https://www.stankoff.ru/files/blog/9gKffNBxwZfKX8xu4XZnh74u77oMWzXw6NreGjCy-sm.jpg) Что такое нержавеющая сталь? [ Часть 2]
Что такое нержавеющая сталь? [ Часть 2]![Гибка листового металла - методы и советы по проектированию [часть 1]](https://www.stankoff.ru/files/blog/GO1VKbFFRkZ2mP57FYJnZACDplzbp67kVwrumTJf-sm.jpg) Гибка листового металла - методы и советы по проектированию [часть 1]
Гибка листового металла - методы и советы по проектированию [часть 1] Почему каждый инженер должен использовать САПР?
Почему каждый инженер должен использовать САПР? Токарная обработка с ЧПУ - процессы, операции и оборудование часть 2
Токарная обработка с ЧПУ - процессы, операции и оборудование часть 2 Как работает плазменная резка? Преимущества и недостатки
Как работает плазменная резка? Преимущества и недостатки Как собрать самодельный фрезерный станок с ЧПУ + Чертежи и схемы!
Как собрать самодельный фрезерный станок с ЧПУ + Чертежи и схемы!
Привет а если я хочю трубу на 100Ват это влезет в твой станок?или какие детали заменить?и можно поставить другой контролер например такой
https://aliexpress.ru/item/32985506173.html
и 2 файла битые ссылки скочать не удается
Сборка, вид сзади.pdf
Сборка, вид справа.pdf
Здравствуйте, мы обновили ссылки на чертежи. К сожалению не могу подсказать, насчет изменения комплектующих.
подсоеденил всё по схеме ,моторы не крутяться только дребезжат не подскажите почему?
Провода обмоток двигателей перепутаны или на драйвере подаётся мало тока
Доброго времени суток, господа! Есть ли тут те, кто собирал данный гравер, поделитесь опытом
Спас огромное за перевод статьи
Добрый день, попутал меня бес обновить прошивку в программе лазер грбл, и щас лазер не выключается горит постоянно, у меня ардуино уно стоит была прошивка 0,9j, 50W труба. собирал не я поэтому и незнаю как быть и что можно сделать? если можно на маил прислать прошивку ksp5@mail.ua спасибо или совет куда копать что менять
Прежде чем собирать станок, нужно определиться, от чего именно он будет питаться, куда будет смонтирован светодиод и как распределить ток.
Не нужно экономить на каждой детали и делать направляющие ровнее заводских или менять ШВП на шпильку. Такой станок работать будет, но качество его работы вас расстроит и заставит пожалеть о потраченных на него времени и финансах.
Смету расходов надо постараться составить заранее, не оставляя белых пятен ни на что - ни на материалы, ни на обработку на стороне. И всегда прибавляйте 30-60% сверху - непредвиденные расходы будут всегда.
Это гениально сделано, как смотришь и читаешь вроде все просто. Но наверное автору понадобилось очень много времени что б собрать данный станок. Руки у него золотые, мастер своего дела. Такое сделать не каждый сможет. Нужны мозги. Вещь нужная в хозяйстве все пригодится. Спасибо что поделилась свои опытом. Было интересно почитать и посмотреть
Вот это действительно крутое устройство. Мне всегда подобные вещи как такие станки нравились и еще 3d принтеры. Возможности у этих анрегатов практически безграничные..автору несомненно респект и огромняа благодарность за статью..
эт тебе не курятник сколотить)))
Это украденая статья. Оригинал
https://www.instructables.com/Make-Your-Own-High-Quality-CO2-Lasercutter-With-To/
Здравствуйте, данная статья является переводом статьи ранее опубликованной на английском языке (ссылку на которую вы прислали). В примечании говорится о данном факте.